カントリーハウス、サマーコテージの家、温室、およびさまざまな農場の建物の建設において、自律電源システムがますます使用され始めています。 ソーラーパネルは、一般的な電気ネットワークからの独立性を提供します。 そして民間の都市では、家の屋根に自家発電所の太陽光パネルが設置されているのをよく見かけます。
これらのパネルは、単結晶および多結晶シリコン構造を使用することができ、アモルファスまたはマイクロモルフィック技術を使用して製造された電池に基づいて構築でき、さらには「モスアイ」技術を使用して製造された太陽電池を使用することもできます。 また、各建物は太陽光が最も当たる場所に太陽光パネルが設置されるように建てられています。
最新のヘリウム システムの効率は平均して 18% ~ 20% を超えません。 最高のサンプルでは 25% の効率を達成できます。 2014 年、UNSW オーストラリア先進太陽光発電センターの科学者は、太陽電池効率 40% を達成したと報告しました。
効率値は、ヘリウムパネルが太陽に直角に照らされたときに測定されることを理解されたい。 太陽電池が恒久的に固定されている場合、日中、太陽が空を横切るとき、太陽が電池を直接照らす期間は比較的短くなります。 したがって、最先端のソーラーパネルであっても効率は低下します。
ヘリウムシステムの効率の低下を最小限に抑えるには、ソーラーパネルを回転モジュールに設置する必要があります。これにより、バッテリーを一日中太陽の方向に向けることができます。 1 つまたは複数のソーラー パネルを備えた支持構造が取り付けられたこのような回転装置は、トラッカーと呼ばれます。
太陽を監視し、その位置に応じてソーラーパネルを太陽の方向に向けるように設計されています。 このデバイスには、バージョンに応じて 1 つまたは 2 つの太陽追跡センサーと回転機構が含まれています。 トラッカーは、地面、固定スタンド、または太陽電池が常に太陽に照らされるような高さまでトラッカーを持ち上げるマスト上の明るい場所に設置する必要があります。
マストに 4 つのソーラー パネルを備えたトラッカー
太陽追跡システムを備えた最も単純な回転装置でも、ゲル電池から最大限の効率を得ることができます。 研究によると、ソーラーパネルを太陽に対して適切な向きに設置しないと、最大 35% の電力が失われることがわかっています。 したがって、太陽電池を固定設置した場合に計画電力を達成するには、より多くのパネルを設置する必要がある。
太陽光パネル回転制御システムの構築原理
業界では、いくつかのタイプのソーラー パネル回転制御システムを製造しています。 これらは、複数のヘリウムパネルの位置を一度に制御できる非常に高価な(最大10万ルーブル)デバイスです。
太陽は日中水平方向だけでなく垂直方向にも移動するため、これらの制御システムは両方の位置の変化を監視し、受信した情報に従ってパネルを水平軸または垂直軸の周りに回転させるコマンドを発行します。 一般に、このような制御システムは、太陽光センサー、このセンサーからの信号変換器 (P)、信号増幅器 (U)、マイクロコントローラー (MC)、エンジン制御装置 (ECD)、エンジン自体、および、最後に、それが取り付けられるフレーム自体、ヘリウムパネル。

トラッカー制御回路
両軸の回転制御に同じ回路を使用しているのが特徴です。 太陽位置センサーとモーターのみが異なります。 最も単純な太陽位置センサーは、不透明な隔壁で分離された 2 つのフォトダイオードで構成されます。
このセンサーがどのような動きを監視するかに応じて、パーティションは水平または垂直に設置されますが、厳密に太陽に向ける必要があります。 両方のフォトダイオードが等しく照射されている限り、それらからの信号は等しくなります。 太陽が大きく動き、フォトダイオードの 1 つが隔壁の影になるとすぐに、信号の不均衡が発生し、制御システムが対応するコマンドを生成してソーラー パネルを回転させます。

太陽位置センサー回路
ターンテーブルのモーターとしては、通常、ステッピングモーターやリラクタンスバルブモーターが使用されます。 このような制御システムでは、追跡センサーが同じプラットフォームに設置され、プラットフォームとともに回転するため、太陽に対するヘリウム パネルの正確な方向が保証されます。 センサーの信頼性の高い動作のためには、センサーを汚染、積雪、およびランダムな物体による光学系の影から保護する必要があります。
追跡センサーが支持回転プラットフォームから取り外され、そのような影響から保護された場所に配置される制御システムがあります。 この場合、センサーからの信号はシンクロナイザー送信機に送信されます。 追跡センサーを太陽に向けることにより、シンクロトランスミッターは制御動作をシンクロレシーバーに送信し、シンクロレシーバーが支持プラットフォームを回転させ、正確に太陽に向けます。
時計機構を利用したソーラーパネル回転制御システム
産業用設備(二軸回転モジュールを備えた完全装備のヘリウム発電所)は非常に高価です。 たとえば、UST-AADAT 産業用トラッカーの価格は約 150 万ルーブルです。 すべての太陽光発電所所有者の自然な願望は、コストを削減しながら発電量を増加させることです。 その結果、廃材を使用したオリジナルのデザインの自家製デバイスが登場しました。 そして、これらのデバイスは、太陽に対するパネルの向きを非常にうまく制御します。
このようなデバイスのオプションの 1 つは、時計機構に基づいて構築されたヘリウム パネルの向きを制御するシステムです。 太陽を追跡するために、受光素子を使用する必要はまったくありません。 これを行うには、普通の機械式壁掛け時計を使用してください。 年老いたウォーカーでも大丈夫です。 太陽は 1 時間で空を東から西へ 15° の角変位に相当する経路を移動することが知られています。 このような角変位はヘリウムパネルにとって特に重要ではないため、回転機構を 1 時間に 1 回オンにすれば十分です。

太陽の動きを時計で追跡する
ヘリウムパネルを垂直軸を中心に回転させる装置は次のようになります。 文字盤の中心から分針の長さの距離、12時にあたる位置に固定接点が設けられています。 可動接点は分針の先端にあります。
したがって、60分ごとに接点が閉じ、モーターがオンになり、ソーラーパネルが回転します。 エンジンは、リミットスイッチやタイムリレーを使用するなど、さまざまな方法でオフにできます。 文字盤の6時位置にもう一つ固定接点を設置すると、30分ごとにパネル位置が修正されます。
この場合、エンジン停止装置はキャリアプラットフォームを 7.5°の角度で回転するように設定する必要があります。
さらに、必要に応じて、このメカニズムでは、別の接点グループの助けを借りて、時計回りに、ソーラーパネルを元の位置に自動的に戻す回路を組み立てることができます。 同じ時計回りの針に基づいて、水平軸を中心にパネルを回転させるための制御システムを組み立てることができます。 時針が12時方向に移動すると、太陽とともに支持枠が上昇します。 12 時間後、水平軸モーターが逆転し、ソーラー パネルが逆方向に回転し始めます。
ソーラーパネル回転制御システムにおける水時計の原理
このシステムは、カナダ出身の 19 歳の学生、エデン・フルによって発明されました。 単軸トラッカーを制御するように設計されています。 動作原理は以下の通りです。 回転は水平軸を中心に実行されます。 ソーラーパネルは、太陽光線がパネル面に垂直になるように初期位置に設置されます。
水の入った容器がパネルの片側に吊り下げられ、反対側に荷重が吊り下げられ、水が入った容器と平衡状態になります。 容器の底には小さな穴が開いており、この容器から水が一滴ずつ流れ出ます。 この穴のサイズは実験的に選択されます。 水が流出すると容器は軽くなり、カウンターウェイトがパネル付きフレームをゆっくりと回転させます。

水時計トラッカー
トラッカーの動作準備は、空のコンテナに水を注ぎ、ソーラー パネルを元の位置に配置することから構成されます。
これら 2 つの例は、回転モジュールを構築するための可能なオプションをすべて網羅したものではありません。 少しの想像力があれば、家庭用ヘリウム発電所の効率を確実に高める、シンプルだが非常に効果的な装置を手に入れることができます。
最近、友人から、小型モーターを使ってソーラーパネルを太陽の後ろに向けるための「ヘリオスタット」を作ってほしいと頼まれました。 回路はインターネットから取得し、元のボードをテストしたところ、動作しました。 しかし、私はまた、抵抗器とコンデンサを平面 SMD タイプに取り付けることができる、よりコンパクトな独自のプリント回路基板も描きました。
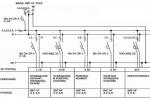
以下は作者による回路説明です。 このデバイスはパルス制御を使用しており、ソーラーパネルを最適な照明に自動的に向けることができます。 回路図は、クロック ジェネレーター (DD1.1、DD1.2)、2 つの積分回路 (VD1R2C2、VD2R3C3)、同数のドライバー (DD1.3、DD1.4)、デジタル コンパレーター (DD2)、2 つのドライバーで構成されます。太陽電池を搭載した架台の回転を制御する電動モータM1の回転方向を制御するインバータ(DD1.5、DD1.6)とトランジスタスイッチ(VT1~VT6)とを備えている。
電力が(ソーラーパネル自体から、またはバッテリーから)供給されると、要素 DD1.1、DD1.2 に基づく発電機は、約 300 Hz の周波数のクロック パルスを生成し始めます。 デバイスの動作中、インバータ DD1.3、DD1.4 と積分回路 VD1R2C2、VD2R3C3 によって生成されるパルスの持続時間が比較されます。 それらの傾きは積分時定数に応じて変化し、さらにフォトダイオード VD1 と VD2 の照度に依存します (コンデンサ C2 と SZ の充電電流はそれらの照度に比例します)。
積分回路の出力からの信号は、レベル ドライバ DD1.3、DD1.4 に供給され、次に DD2 マイクロ回路の要素で作られたデジタル コンパレータに供給されます。 コンパレータの入力に到着するパルス持続時間の比率に応じて、要素 DD2.3 (ピン 11) または DD2.4 (ピン 4) の出力にローレベル信号が現れます。 フォトダイオードの照明が等しい場合、コンパレータの両方の出力に高レベルの信号が存在します。
インバータ DD1.5 と DD1.6 は、トランジスタ VT1 と VT2 を制御するために必要です。 最初のインバータの出力の信号レベルが高いと、2 番目のインバータの出力 - VT2 でトランジスタ VT1 が開きます。 これらのトランジスタの負荷は、電気モータ M1 の供給電圧を切り替える強力なトランジスタ VT3、VT6 および VT4、VT5 のスイッチです。 回路 R4C4R6 および R5C5R7 は、制御トランジスタ VT1 ~ VT2 のベースのリップルを平滑化します。 電源の接続極性によりモーターの回転方向が変わります。 デジタル コンパレータでは、すべての主要なトランジスタが同時に開くことができないため、システムの高い信頼性が保証されます。
太陽が昇ると、フォトダイオード VD1 と VD2 の照度が異なり、電気モーターが太陽電池を西から東に回転させ始めます。 シェーパーによって生成されるパルスの持続時間の差が減少するにつれて、結果として生じるパルスの持続時間も減少し、太陽電池の回転速度が徐々に遅くなり、正確な位置決めが保証されます。 したがって、パルス制御を使用すると、ギアボックスを使用せずに、電気モーターシャフトの回転を太陽電池を備えたプラットフォームに直接伝達できます。
日中は、太陽電池を搭載したプラットフォームが太陽の動きに合わせて回転します。 夕暮れが始まると、デジタル コンパレータの入力におけるパルス幅は同じになり、システムはスタンバイ モードに入ります。 この状態では、デバイスの消費電流は 1.2 mA を超えません (オリエンテーション モードでは、モーターの電力に依存します)。
ヘリオスタット バッテリーは、ソーラー パネルによって生成されたエネルギーを保存し、電子ユニット自体に電力を供給するために使用されます。 電動モーターはバッテリーを回転させるために(短時間)オンするだけなので、電源スイッチはありません。 この図は太陽電池を水平面に向けたものです。 ただし、位置を決めるときは、その地域の地理的緯度と時期を考慮する必要があります。 同様のスキームに従って組み立てられた垂直偏向ユニットで設計を補足すると、両方の面でバッテリーの方向を完全に自動化できます。
緑色光フィルターはフォトダイオードを過剰な照射から保護するために使用されます。 不透明なカーテンが光センサーの間に配置されます。 照明角度が変化するとフォトダイオードの 1 つが影になるように、基板に対して垂直に固定されています。 詳細については、添付のアーカイブの記事をご覧ください。 プリント基板の全体図:

組み立て後、デバイスの動作をチェックしました。すべてが正常に動作し、1 つ目と 2 つ目の LED が点灯すると、モーターが時計回りと反時計回りに動作します。

ラジエーターはやや大きいですが、それほど大きくする必要はありませんが、友人が気に入ったので、完成したボード2枚用に半分に切ると言いました。まだ決定していないため、今のところテスト中です。モーターの力。

これらのラジエーターはすべて電源から取り外されており、私はそれらをたくさん集めました、そして人々はすべてを運び、運びます。 発達 - I.ツァプリン。 回路の組み立てとテスト - イゴラン.
記事について議論する ソーラーパネルロータリーコントローラー
電波天文学、太陽エネルギー、宇宙通信、地表や他の惑星の探査の発展の見通しは、大型構造物を宇宙に打ち上げる可能性に直接関係しています。 現在、ロシア国内外で、宇宙望遠鏡やアンテナ、エネルギーや科学のプラットフォーム、大型ソーラーパネル(SB)など、大規模な宇宙空間にさまざまなクラスの構造物を構築することを目的とした研究が行われている。
大型の宇宙構造物の作成分野で急速に発展している重要な分野の 1 つは、ドロップダウン型ソーラー パネルと、さまざまな目的で宇宙船 (SC) に設置されるアンテナの開発です。
宇宙船のサイズと複雑さが増すにつれて、打ち上げロケットのフェアリングの下に宇宙船を配置するという要件が重大な設計上の制限になります。 これにより、輸送中と軌道上での動作状態で異なる構成を持つ宇宙船が作成されるようになりました。 宇宙船には、さまざまなアンテナ、機器やセンサーが取り付けられた折りたたみロッド、安全パネルなどの変形可能な構造が含まれており、これらは宇宙で開き、軌道上で機能するために必要な形状になります。 したがって、現代の宇宙船は、特定の方法で互いに接続された物体の集合体です。 原則として、宇宙船には変形可能な構造物が取り付けられた主要な巨大ブロックがあります(図B1)。
1 - 太陽電池; 2 - 太陽方位センサー。 3 - 全方向性 S バンド アンテナ。 4 - C バンド アンテナ (直径 1.46 m)。 5 - マルチチャンネルアンテナ(フェーズドアレイアンテナエミッター)。 6 - 操縦可能なアンテナ (K-S バンド シングル アクセス、宇宙間通信リンク用の K バンド) (直径 4.88 m)。 7 - 軌道速度ベクトルの方向。 8 - 地球への方向。 9 - 30 素子の S バンド フェーズド アレイ アンテナ (マルチチャネル通信線)。 10 - 制御された K バンド アンテナ (宇宙-地球通信線) (直径 1.98 m)。 11 - Kバンドアンテナ(直径1.13m)
したがって、最新の宇宙船が打ち上げロケットのフェアリングの下に収まるようにするには、すべての変形可能な構造物をコンパクトな輸送位置に特定の方法で設置する必要があります。 宇宙船が特定の軌道に打ち上げられた後、すべての変形可能な構造が所定のプログラムに従って展開されます。 一般的なケースでは、変形可能な構造を動作位置に移動させる段階の数は非常に多くなる可能性があります (図 B2)。

1 - 導入前の要素の初期構成。 2 - ソーラーパネルの切り離しと展開。 3 - 太陽電池ロッドの固定。 4 - 宇宙-地球通信線アンテナの配備。 5 - Cバンドアンテナの展開。 6 - 眼窩間タグIDSのコンパートメント。 7 - シングルアクセスアンテナロッドの展開とアンテナの回転。 8 - すべての要素を展開した後の最終構成
変形可能な構造の要素の移動中、要素は特定の位置に固定されますが、移動は電気駆動装置の助けとさまざまな種類のバネの変形エネルギーの両方によって実行されます。
したがって、宇宙船の寸法を超える寸法を持つ特殊な機能目的の搭載システムを作成するという問題は、折り畳まれた輸送状態での最小重量と体積、宇宙船からの展開の高い信頼性などの相反する要件を満たす折り畳み構造の開発に帰着します。作業位置への輸送状態と軌道上での動作、開いた状態での最大作業表面積、負荷条件下での安定した性能特性。 このような構造の性能は主に、開くときに構造内に発生する力の強さによって決まります。したがって、信頼性の高い開口を確保することは、複雑な機械的問題の解決につながります。
このような構造の設計は大幅に進歩しましたが、大型構造をスムーズかつ確実に開口し、その後の機能を確保するという課題は依然として重要です。
宇宙技術開発の現在の傾向により、高電力供給と 15 年以上の長い耐用年数を備えた宇宙船を作成する必要性が求められています。 宇宙船の電源の増加には、SB翼の有効面積の増加が伴います(図B3)。

同時に、それらは軌道に投入される既存の宇宙船打ち上げロケットのペイロードゾーンに配置されなければなりません。 このような状況下では、明らかな解決策は 1 つだけです。パネルの数を増やして SB 翼を構築し、宇宙船を軌道に乗せる段階で合理的なパッケージに折り畳むことです。 地上実験では、SB展開プロセスの実際の状況を十分に再現し、展開システムの信頼性や性能を十分に確認することはできません。 セキュリティシステム開示システムの障害または異常な機能は、ほとんどの場合、緊急事態につながります。 数学的モデリング手法の使用は品質を大きく左右し、折りたたみマルチリンク SB の開発時間とコストを削減します。 これにより、SBの開発、製造、実験、運用の全期間にわたって、信頼性解析、故障予知、緊急事態発生などのきめ細かな情報サポートが可能となります。
本発明は、作業面と後面の両方から有用な電力を供給する、ソーラーパネル(SB)を介した宇宙船(SC)の電力供給に関する。 提案されたシステムには、ソーラーパネルを回転させる装置、増幅変換装置、ソーラーパネルを太陽に向ける方向を制御する制御ユニット、ソーラーパネルを所定の位置に回転させるブロック、電流レギュレータのブロックが含まれています。電流センサーと電源システムの制御ユニット。 このシステムにはさらに、宇宙船の軌道の高さ、宇宙船の向き、宇宙船から見える地球の地平線上の太陽の仰角といった測定ブロックが含まれています。 直達日射の影響で太陽系が生成する最大電流値を設定するブロックがあります。 地球から反射した放射線がソーラーパネルの動作面に当たる瞬間、地球から反射した放射線がソーラーパネルの裏面に当たる瞬間、追加の電気が発生する瞬間を判断するためのブロックも導入されています。地球から反射された放射線の影響下にあるソーラーパネル、ソーラーパネルの回転角度、および太陽放射によって照らされた作業面の部分の面積SB。 この回路には、2 つのキーと要素 NOT と OR も含まれています。 本発明の技術的成果は、宇宙船の設計要素による太陽光発電面の影の可能性を考慮しながら、地球から反射して太陽光発電の作業面と背面に到達する太陽放射をより完全に利用することにより、太陽光発電出力を増加させることである。 。 8 病気。
RF 特許 2341421 の図面







本発明は、宇宙技術の分野、すなわち宇宙船(SC)の電源システム(SES)に関するものであり、太陽電池パネル(SB)の位置を制御するために使用することができる。
太陽系の高効率を確保するために、ほとんどの宇宙船には太陽への方向を自動的に設定するシステムが装備されています (190 ~ 194 ページ、 、57 ページを参照)。 このようなシステムの構成をアナログとしてみると、太陽センサー、論理変換装置、太陽系の位置を制御する電気駆動装置が含まれます。 システムの動作中、ソーラー パネルは、照射される作業面の法線と太陽の方向との間の角度が最小値になるように方向付けられ、ソーラー パネルからの電気の流れが最大になるようにします。
宇宙船 SB の位置を制御するこのシステムの欠点は、たとえば環境要因 (EFF) の悪影響から保護するために、SB を設計上の固定位置に配置する操作が提供されていないことです。 FWS は、太陽放射の高エネルギー粒子の流れ、または動作している宇宙船の方向調整エンジンから発生するガスの流れである可能性があります。
プロトタイプとして採用された最も近い類似物は、p.6 で説明されている SB 宇宙船の位置制御システムです。
システムのブロック図には、ハウジングの硬質基板上に太陽電池ユニット (PVB) と太陽電池パネル回転装置 (UPSB) がある太陽電池パネルが含まれています。 増幅変換装置 (ACD); SB を太陽方向に向ける制御ユニット (BUOSBS)。 SBを所定の位置に回転させるためのブロック(BRSBZP)。 電流調整ブロック (BRT)、AB ブロック (BAB); バッテリー用充電器 (ZRU AB); バッテリー充電用のコマンドを生成するユニット (BFKZ AB)。 負荷電流センサー (LCS); 電源システム制御ユニット (BUSES); 電源バス(SE)。 この場合、BSE の出力は BRT の入力に接続されます。 BRT の出力は SE に接続されます。 BAB は、AB 閉開閉装置を介してその入力によって ShE に接続されます。 AB スイッチギヤはその最初の入力によって ShE に接続され、DTN 出力は AB スイッチギヤの 2 番目の入力に接続され、AB スイッチギヤの入力はさらに ShE に接続されます。 BAB とその出力は BFKZ AB の最初の入力に接続され、BUSES の最初の出力は指定されたブロックの 2 番目の入力に接続されます。 BFKZ AB の出力は、ZRU AB の 3 番目の入力に接続されます。 BUSES の 2 番目と 3 番目の出力は、それぞれ BUSBS と BRSBZP の 1 番目の入力に接続されています。 UPSB 出力は 2 番目の入力 BUOSBS および BRSBZP に接続されます。 BUOSBS と BRSBZP の出力はそれぞれ UPU の 1 番目と 2 番目の入力に接続され、その出力は UPSB の入力に接続されます。 また、UPSB は SB に機械的に接続されています。
このシステムによって実現されるアクションの本質は次のとおりです。 SB からの電気の流れを最大化するために、SB パネルは、照明される作業面の法線と、SB パネルの回転軸と太陽への方向によって形成される平面の位置合わせに対応する作業位置まで回転されます。 。 次に、SB の作業面に対する FVS の悪影響が始まる瞬間が特定され、SB パネルは、照射された作業面の法線と太陽の方向との間の指定された角度で回転され、指定された要因の衝撃の開始時刻、および指定された衝撃の終了後に SB パネルが作業位置に戻ります。
BSEで発電された電力はSBからBRTに送電される。 次に、BRT からの電力が ShE SES に供給されます。 軌道の影の部分(太陽系からの電流がない状態)では、バッテリーユニットの放電により、バッテリー開閉装置が宇宙船上の電力不足を補います。 これに伴い、AB ZRU は BFKZ AB を介して BAB に充電します。 同時に、DTN からの情報を使用して、バッテリ開閉装置で充放電サイクルが実行されます。
このシステムは、宇宙船電力供給モードでの動作と同時に、太陽電池パネルの平面の位置を制御する問題を解決します。 実行されている宇宙船飛行プログラムに応じて、SB 制御の優先順位は BUOSBS ブロックまたは BRSBZP ブロックのいずれかに与えられます。
BUSES からのコマンドに応じて、BUSBS ブロックは太陽に対する太陽系の向きを制御します。 太陽制御アルゴリズムの入力情報は、宇宙船に関連付けられた座標軸に対する太陽上の単位方向ベクトルの位置です。 宇宙船本体に対するSBの位置。SBの作業面の法線の現在位置と角度センサー(AS)からの太陽方向との間の角度の現在の測定値の形で取得されます。 UPSBにインストールされています。 SB が太陽の方向を向いている場合、0。制御アルゴリズムの出力情報は、UPSB 出力軸の軸に対して SB を回転させるコマンドと回転を停止するコマンドです。 UPSB リモート コントロールは、安全システムの位置に関する個別の信号を提供します。 個別のサイズによって衛星の方向の精度が決まります。
BRSBZP は、プログラム設定に従って BUSES を利用して SB を制御します。 ソフトウェア設定に基づく SB 制御アルゴリズムにより、必要な角度値 = 2 で指定された任意の位置にバッテリーを取り付けることができます。 同時に、BRSBZP の回転角度を制御するために、UPSB リモコンからの情報も使用されます。
UPU は、BUOSBS、BRSBZP、UPSB 間のインターフェイスの役割を果たします。
地球に到達する太陽放射は、地球の表面や雲から反射され、大気によって散乱されることが知られています (p.272 を参照)。 太陽電池の感度領域のスペクトル範囲に集中した反射放射線のエネルギーは、太陽電池によって感知され、その出力電力が増加します。
したがって、宇宙船の軌道の照らされた部分では、SB は直接太陽放射に加えて、地球から反射された放射も受け取ります。 プロトタイプとして採用された方法とシステムには重大な欠点があります。地球から反射される太陽放射をさらに利用して電力の流れを増やすことができないということです。
提案されたシステムが直面している課題は、表面の陰影の可能性を考慮して、地球から反射され、ソーラーパネルの作業面と背面に到達する太陽放射を追加的に使用することにより、ソーラーパネルからの電気の流れを増やすことです。宇宙船の設計要素によるソーラーパネルの設計。
技術的成果は、宇宙船の太陽電池パネルの位置を制御するシステムが達成され、そのシステムには、背面に正の出力電力を有する太陽電池が含まれ、その上に太陽電池のブロックが設置され、太陽電池パネルを回転させる装置が含まれる。ソーラーパネル、増幅変換装置、太陽の方向に応じてソーラーパネルの向きを制御する制御ユニット、ソーラーパネルを所定の位置に回転させるブロック、電流レギュレータのブロック、電流センサー、制御ユニット電源システムとしては、太陽電池ブロックの出力が電流調整ブロックの入力に接続され、電流調整ブロックの出力が電流センサーの入力に接続され、方向制御ブロックの出力が太陽光パネルに接続されます。太陽の方向とソーラーパネルの所定の位置への回転は、それぞれ増幅変換装置の第1入力と第2入力に接続され、その出力はソーラーパネルを回転させる装置の入力に接続され、その出力は、ソーラーパネルを太陽の方向に向け、ソーラーパネルを所定の位置に回転させるための制御ユニットの入力に接続されており、ソーラーパネルを回転させるための装置は、ソーラーパネルに機械的に接続されているバッテリー; 宇宙船の軌道の高度を測定するための追加ブロック、宇宙船の方向を測定するためのブロック、宇宙船から見える地球の地平線上の太陽の仰角を測定するためのブロック、最大値のタスクブロック直接太陽放射の影響下でソーラーパネルによって生成される電流、地球から反射された放射線がソーラーパネルの作業面に当たる瞬間を決定するためのブロック、地球から反射された放射線が背面に当たる瞬間を決定するためのブロックソーラーパネルの表面、地球から反射された放射線の影響下で太陽電池が追加の電気を生成する瞬間を決定するためのブロック、ソーラーパネルの回転角度を決定するためのブロック、太陽電池パネルの面積を決定するためのブロック太陽放射によって照らされるソーラーパネルの作業面の一部、2つのスイッチと要素はNOTおよびORであり、電流センサーの出力はソーラーパネルの回転角度を決定するためのブロックの最初の入力に接続され、ブロックは決定します地球から反射された放射線の影響下で太陽電池によって追加の電気が発生する瞬間。その出力と2番目から4番目の入力はそれぞれNOT要素の入力と設定用ブロックの出力に接続されています。直接太陽放射の影響下で太陽電池によって生成される電流の最大値、太陽放射によって照らされる太陽電池パネルの作業面の部分のOR要素および決定ブロック領域、第1および第2の入力、およびその出力は、それぞれ、宇宙船方位測定ユニットの出力、ソーラーパネル回転装置、及びソーラーパネル回転角度決定ユニットの第2の入力にも接続され、その出力と第3から第8の入力が接続され、それぞれ、ソーラーパネルを所定の位置に回転させるためのブロックの2番目の入力と、ソーラーパネルを回転させるためのデバイスの出力、直射日光の影響下でソーラーパネルによって生成される電流の最大値を設定するためのブロック、宇宙船の軌道の高度を測定するためのブロック、太陽電池パネルの作業面や裏面に当たる地球からの放射線の反射の瞬間を測定するためのブロック、そして目に見える地球の地平線上の太陽の仰角を測定するためのユニットです。宇宙船からの信号であり、その出力は、地球から反射されて太陽電池パネルの作業面と背面に当たる瞬間を決定するためのブロックの最初の入力にも接続されており、その 2 番目の入力はブロックの出力に接続されている宇宙船の軌道の高度を測定するためのものであり、一方、太陽電池パネルの作業面および背面に当たる地球からの放射線の反射の瞬間を決定するためのブロックの出力も、それぞれOR要素の異なる入力に接続されており、電源システム制御ブロックの出力は、最初と 2 番目のキーの情報入力に接続され、その制御入力は NOT 要素の出力と、太陽光による追加電力の生成の瞬間を決定するブロックに接続されます。それぞれ地球から反射された放射線の影響下にあるパネルであり、最初と 2 番目のキーの出力は、太陽に向かうソーラー パネルの向きを制御するブロックの 2 番目の入力と、ブロックの 9 番目の入力にそれぞれ接続されています。ソーラーパネルの回転角度を決定するブロック。
提案される発明は、ソーラーパネルが宇宙船の構造要素によって遮られるクラスの宇宙船、およびソーラーパネルの背面から照射されたときにソーラーパネルが正の出力電力を有する宇宙船に適用される。
提案された技術的解決策は、SB パネルの動作面と背面に入射する、地球から反射された太陽放射の追加使用により、SB パネルの背面の正の出力電力を持つ SB によって生成される電流の増加を達成します。 SBパネル。 これを行うには、宇宙船が軌道の照らされている部分にあるとき、ソーラーパネルの作業面の法線が太陽の方向を向き、地球から反射された太陽放射が作業面に到達する時間間隔が決定されます。またはソーラーパネルの背面にあります。 次に、ソーラーパネルの作業面に到達する直接太陽放射と、作業面に到達する地球からの反射光によるソーラーパネルの全照度から最大の発電量が確保されるように、ソーラーパネルが回転します。ソーラーパネルの裏面。
提案された発明の本質は、図1〜8に示されており、図1および2では、地球からの反射日射が到達する場合の、地球からの直接および反射日射によるソーラーパネルの照明図を示しています。それぞれ、ソーラーパネルの作業面と背面にあります。 提案システムにおけるSB照明図を示す図である。 以下に入力される角度の定義を説明する幾何学的構造の図である。 SBの陰影を考慮した、SBの作業面の照射領域の決定を説明する幾何学的構造の図である。 提案システムのブロック図である。 図8は、国際宇宙ステーション(ISS)のロシアセグメント(PC)のSBからの電力の到達を示すグラフである。
提案システムにより実現される動作について説明する。
記載されている太陽系照明スキームを説明する図 1 ~ 4 では、すべての構造は宇宙船の動径ベクトルと太陽への方向によって形成される平面内で作成され、次の記号が導入されています。
N - SB パネルの作業面に垂直。
S、PC、BC * - 太陽への方向ベクトル。
O - 地球の中心。
または - 宇宙船の半径ベクトル。
OB - 地球の半径。
B は反射された放射線の流れが宇宙船に入る点です。
宇宙船から太陽への方向と点 B への方向の間の角度。
MM * - 点 B の水平線。
S および は、宇宙船に到達する太陽放射の地球からの入射角と反射角です。
PD - 宇宙船から地球の地平線までの方向。
B * - 線PDによる地球との接点。
g は、宇宙船から見える地球の地平線上の太陽の仰角です。
Q z は、宇宙船から見える地球の円盤の半角です。
RO 方向と RV 方向の間の角度。
Q sb は、法線Nから測定された、SBパネルの作業面の感度ゾーンの半角である(図1および3にのみ示されている)。
N と S の間の角度 (図 3 と 4 にのみ示されています)。
図 2 と 4 では、さらに次のように示されています。
N O - SB パネルの背面に垂直。
S O - 反太陽方向。
方向 N o と宇宙船から点 B への方向との間の角度。
Q O - 通常の N O から測定した、SB パネルの背面の感度ゾーンの半角。
SB の現在の方向を考慮します。SB の作業面の法線 N が太陽 S の方向と組み合わされます (同時に N o が S o と組み合わされます)。
私たちは、ソーラーパネルの検討対象の各表面の感度ゾーンの概念を使用します。これは、ソーラーパネルが電流を生成できる側から照射されたときに、ソーラーパネル要素の設計特徴によって決定される領域です。 ソーラーパネルの各表面の感度ゾーンを、ソーラーパネルの対象となる表面の法線から測定したゾーンの半角の値によって設定します。
Q sb - SB パネルの作業面の感度ゾーンの半角、Q sb<90°,
Q o - SB パネルの背面の感度ゾーンの半角、Q o<90°.
これらの領域の外側から太陽系を照らす場合、生成される電流は存在しないか、無視できるほど小さいです。
地球から反射された放射線が宇宙船に到達するのは、軌道の照らされた部分でのみ可能ですが、反射点 (点 B) の位置は、入射角 s と太陽放射線の反射の比によって決まります。地球から(39 ~ 52 ページを参照)。
宇宙船が地球の影から出て軌道の照らされた部分に入った後、宇宙船が地球の影に入る前に、地球から反射された放射線がソーラーパネルの作動面に当たります(図1に示すケースA)。
軌道のこのセクションは、次の条件によって決まります。
SB 感度ゾーンの概念を考慮すると、以下の条件が満たされる場合、地球から反射された放射線が SB パネルの作業面で発電に使用されます。
その後、地球から反射された放射線が太陽系の作動面に当たり、発電への使用もこの条件下で実行されます。
宇宙船が軌道の照射部分の中央にあるとき、地球から反射された放射線はソーラーパネルの裏面に影響を与えます(図2のケースB)。 軌道のこのセクションは、次の条件によって決まります。
SB 感度ゾーンの概念を考慮すると、以下の条件が満たされる場合、地球から反射された放射線が SB パネルの背面で発電に使用されます。
角度を決定するには、さまざまな手法を使用できます。
角度 ORS を構成する角度の合計が等しいことから、次のようになります。
ケース A では、角度 g と角度の値が近いため、次の式を使用できます。
ケース B では、角度が小さく、角度と (Q z +g) の値が近いため、次の式を使用できます。
探査機 Q z から見える地球円盤の半角は、三角形 ORV * から求められます。
ここで、R e - 地球の半径、H o - 宇宙船の軌道の高度が示されています。
より複雑な方法を使用して角度を決定することもできます。その可能なオプションの 1 つは、次の計算手順です。
角度 の定義を説明する図 5 では、次のように追加で示されています。
Kは直角三角形ORKの直角の頂点です。
角度は直角三角形 ORK と OVK から決定されます。
式(14)、(18)を(11)に代入して を表すと、角度を正確に求めるための関係が得られます。
角度は、平行線 PC と BC の割線 PB における角度の等しいことから得られる関係式によって角度 、s に関連付けられます *:
反射面の性質により、入射角と反射角が等しいと仮定できる場合:
式(23)を満たす値は、以下の手順で反復して求められる。
この方程式の解を o と相対的に表し、(23) の右辺の関数を次のように表します。
最初の反復では、関数 (24) に 1 (目的の値 o の初期近似値) に等しい値を代入します。 ケース A では、角度 g の値を初期近似値として取得すると便利であり、ケース B では、合計 (Q z +g) の値を取得します。
ステップ i=1、2、3、... に対して反復プロセスを順番に実行し、その各 i 番目のステップで、次の式に従って i+1 - 目標値 o への新しい近似値 - を見つけます。
角度の定義領域を考慮します: (2) - ケース A および (7) - ケース B。さらに、新しいそれぞれの近似値は、前の近似値よりも目的の値 o に近づきます。
取得した新しい近似値 i+1 と以前の近似値 i の差が必要な計算精度 (値 o の計算に必要な精度) よりも小さい場合、反復プロセスを停止します。
なぜなら 将来的には、新しい近似値はそれぞれ、以前の近似値との差が 未満になります。 この場合、一連の逐次近似 i+1、i=1、2、3、... が収束する目標値 o も、最後に得られた近似とわずか の差しかありません。 したがって、必要な計算精度を考慮した o の望ましい値が得られます。
この反復プロセスは、望ましい解決策に迅速に収束します。たとえば、この技術提案の適用例として以下に説明する ISS PC の向きを制御する場合、1° の精度で望ましい値がすでに達成されています。反復プロセスの 4 番目のステップ。
地球から反射された太陽放射が SB に当たらない場合、SB によって生成される電流 I は次の式によって決まります (p. 109 を参照)。
ここで、I は SB によって生成される電流です。
I s_max は、太陽電池パネルの表面に当たる地球から反射された放射線がなく、太陽電池パネルの影がない状態で、太陽電池パネルの照射された作業面が太陽光線に対して垂直に向いているときに、太陽電池パネルによって生成される電流です。宇宙船の設計要素によるソーラーパネルの作業面。
SBによって生成される電流は、SBの太陽電池に影響を与える放射線が当たるSBパネルの表面積に比例すると仮定します。 次のように示しましょう:
ps - 日射束密度。
S s は、太陽放射を受けるソーラーパネルの作業面の部分の面積です。
p o - 地球から反射される放射線の束密度。
S o は、地球から反射された放射線が到達する SB パネルの表面の面積です。
まず、地球から反射された放射線が SB の作業面に到達するケース A を考えてみましょう (図 1 および 3)。
提案システムでは、軌道のこのセクションで、SB N の作業面の法線を、地球から反射された放射線が SB に到達する方向 S から、北と南の間の角度(図3)により、太陽系の作用面における直接太陽放射と地球から反射された放射の合計の影響からSB電力の最大の生成が保証されます。 このSBの向きは、SからNを地球の中心に向かって(地球から反射された放射線がSBに到達する側に)、以下のように求められる角度の計算値だけ回転させることにより行われる。
地球から反射された放射線がソーラーパネルに到達する方向にNがSからある角度でずれている場合、作業パネルに到達する直接太陽放射線と地球から反射された放射線の束の実効値の合計Pソーラーパネルの表面は次の式で計算されます (57 ページを参照)。
最大値 (29) をもたらす角度の値を計算する式は、この式の導関数を 0 から 0 に設定することで得られます。
関係式 (29) から p o S o を表しましょう。
(33) を (32) に代入すると、次のようになります。
次のように示しましょう:
S s_max - SB パネルの最大作業表面積。
総放射線 R の影響下で、SB は電流 I を生成し、放射線束 (ps S s_max) の影響下で、SB は I s_max に等しい電流を生成します。 その中で
(36) を考慮した関係 (34) は次の形式になります。
次に、地球から反射した放射線が SB の裏面に到達するケース B を考えてみましょう (図 2 および 4)。
提案システムでは、軌道のこの部分において、SB 裏面の法線 N o を、地球から反射した放射線が SB に到達する方向 S o から計算値までずらす。 N o と S o の間の角度 (図 4)、SB の作業面と SB の裏面への直接太陽放射 (地球から反射された放射) の合計の影響から SB 電力を最大に生成します。 。 SB のこの方向は、N o を S o から地球の中心に向かって (地球から反射された放射線が SB に到達する方向に) 回転させることによって実行されます。これは、N を S から中心から遠ざけるのと同じです。地球の角度 (または宇宙船の半径ベクトルの方向) は、次のように決定される角度の計算値によって決まります。
N o が S o から地球から反射された放射線が SB に到達する方向に角度 だけずれている場合、方向 N o と地球から反射されて放射線源の SB に到達する放射線の方向との間の角度(点 B) は次の関係によって決まります。
この場合、ソーラーパネルの作業面(直接日射)とソーラーパネルの裏面(地球からの反射放射線)に到達する放射束の実効値の合計Pは、次の式で計算されます。
最大値 (40) をもたらす角度の値を計算する式は、この式の導関数を 0 から 0 に設定することで得られます。
関係式 (40) から p o S o を表しましょう。
したがって、ケースAおよびケースBに対する最適なSBの回転角度を求めるための式(37)および式(46)が得られる。これらの式の解は、以下の手順に従って反復法を用いて相対的に実行される。
方程式 (37) と (46) をそれぞれ次の形式で表します。
(47) と (48) の右辺の関数を次のように表します。
検討中の方程式の解を o と表すことにします。
最初の反復で、関数 (49) に 1 に等しい値 (目的の値 o の初期近似値) を代入します。これに対して 0° をとります (N と S の間の角度の現在の値を取得することもできます)。
ステップ i=1、2、3、... については、反復プロセスを実行します。その各 i 番目のステップで、次の式に従って、i+1 (目的の値 o への新しい近似値) を見つけます。
この場合、新しい近似値はそれぞれ、前の近似値よりも目的の値 o に近づきます。 取得した新しい近似値 i+1 と以前の近似値 i の差が必要な計算精度未満になった場合、反復プロセスを停止します。
なぜなら 将来的には、新しい近似値はそれぞれ、以前の近似値との差が 未満になります。 この場合、一連の逐次近似 i+1、i=1、2、3、... が収束する目標値 o も、最後に得られた近似とわずか の差しかありません。
したがって、必要な計算精度を考慮した o の望ましい値が得られます。
この条件が満たされる場合、地球から反射される放射線を考慮する必要があります。
地球から反射した放射線がソーラーパネルの作業面または背面に当たるため、ソーラーパネルからの電流値が、地球から反射した放射線がソーラーパネルに当たらない場合に得られる最大可能電流値を超えるとき、宇宙船設計のソーラーパネル要素の作業面の現在考えられるシェーディングを考慮した係数を乗算します。
現在の面積S s の値は次のように計算される。 必要な幾何学的構造を説明する図 6 では、次のことが示されています。
X sb 、Y sb は、SBに関連付けられたデカルト座標系の座標軸であり、X sb 軸は、SBの作業面に対して垂直に向けられている。
P 1 P 2 - SB の作業面。
K 1 K 2 - SB の作業面をシェーディングする宇宙船の構造要素。
P 1 P p - 要素 K 1 K 2 によって影が付けられた SB の作業面の一部。
R r R 2 - SB の作業面の照明部分。
P k は、要素 K 1 K 2 の SB の作業面への投影の極点です。
長方形の SB の作業面を考えてみましょう。 SB に関連付けられた座標系内の点 P 1 (0; y 1) および P 2 (0; y 2) の座標は一定であり、SB の作業面の全領域の値 S s_maxは次の式で与えられます。
ここで、L は、SB に関連付けられたデカルト座標系の Z 軸 sb に沿った SB の線形サイズです。
宇宙船の方位パラメータの測定値と宇宙船に対する衛星の位置に基づいて、衛星に関連付けられた座標系で衛星の作業面を影にする宇宙船構造要素の座標を決定します。 SBに関連付けられた座標系におけるシェーディング要素K 1 K 2 の極点の得られた座標をK 2 (x k ;y k )と表すことにする。
次に、点 P k の座標は (0; y k) に等しく、点 P p (0; y p) の座標 y p (SB の作業面の照明部分と影部分を分離する点) が決定されます。式によって
面積 S s の現在の値は、次の式で計算されます。
図 7 に示す提案システムのブロック図には、次のブロックが含まれています。
1 - SB; 2 - BSE。 3 - UPSB; 4 - UPU; 5 - BUOSBS; 6 - BRSBZP; 7 - BRT。
8 - DT; 9 - バス。
10 - 宇宙船の軌道の高さを測定するためのユニット(BIVOKA)。
11 - 宇宙船方位測定ユニット (BIOKA)。
12 - 宇宙船から見える地球の地平線上の太陽の仰角を測定するためのユニット(BIUVSVGZ)。
13 - 直射日光の影響下でソーラーパネルによって生成される最大電流値を設定するためのブロック (BZMTVSBVPSI)。
14 - 地球から反射された放射線がソーラーパネルの作業面に当たる瞬間を決定するブロック(BOMPOSIRPSB)。
15 - 太陽電池パネルの裏面に当たる地球からの放射線の反射の瞬間を決定するためのブロック (BOMPOSITPSB)。
16 - 地球から反射された放射線の影響下で太陽電池によって追加の電気が発生する瞬間を決定するためのブロック(BOMGSBDEVOZI)。
17 - ソーラーパネルの回転角度を決定するブロック (BOUPSB)。
18 - 太陽放射によって照らされるソーラーパネルの作業面の部分の面積を決定するためのブロック(BOPOSIRPSB)。
19、20 - 第 1 キーと第 2 キー。
21 - 要素はありません。
22 - OR要素、
この場合、BSE (2) の出力は BRT (7) の入力に接続されます。 BRT 出力 (7) は DT 入力 (8) に接続されます。 BUOSBS (5) と BRSBZP (6) の出力は、それぞれ UPU (4) の第 1 入力と第 2 入力に接続されます。 UPU (4) の出力は UPS (3) の入力に接続されます。 UPSB (3) の出力は、BUOSBS (5) および BRSBZP (6) の最初の入力に接続されます。 DT 出力 (8) は、最初の入力 BOUPSB (17) および BOMGSBDEVOSI (16) に接続されます。 出力および第2〜第4入力BOMGSBDEVOSI(16)は、それぞれ、NOT要素(21)の入力、BZMTVSBVPSI(13)、OR要素(22)およびBOPOSIRPSB(18)の出力に接続される。 BOPOSIRPSB (18) の第 1 および第 2 の入力および出力は、BIOKA (11)、UPSB (3) の出力、および BOUPSB (17) の第 2 入力にもそれぞれ接続されます。 BOUPSB (17) の出力と 3 番目から 8 番目の入力は、それぞれ BRSBZP (6) の 2 番目の入力と UPSB (3)、BZMTVSBVPSI (13)、BIVOKA (10)、BOMPOSIRPSB (14) の出力に接続されています。 、BOMPOSITPSB (15)、BIUVSVGZ (12)。 BIUVSVGZ (12) の出力は、BOMPOSIRPSB (14) および BOMPOSITPSB (15) の最初の入力にも接続されます。 2 番目の入力 BOMPOSIRPSB (14) および BOMPOSITPSB (15) は、BIVOKA (10) の出力に接続されます。 出力BOMPOSIRPSB(14)およびBOMPOSITPSB(15)も、OR要素(22)の異なる入力にそれぞれ接続される。 バス(9)の出力は、第1キー(19)および第2キー(20)の情報入力に接続されている。 第1および第2のキー(19)および(20)の制御入力は、要素NOT(21)およびBOMGSBDEVOSI(16)の出力にそれぞれ接続される。 第1および第2のキー(19)および(20)の出力は、それぞれ、BUOSBS(5)の第2入力およびBUOSSB(17)の第9入力に接続される。
図 7 には、SB ドライブの出力シャフトを介した UPSB (3) と SB ハウジング (1) の機械的接続も点線で示されています。
システムは次のように動作します。
BSE (2) からの電力は BRT (7) に供給され、そこから宇宙船の SE SES に供給されます。 この場合、BRT(7)は、SBが発生する電流の電流値を測定するDT(8)に接続されます。
BIVOKA (10) では、探査機の軌道高度の値が測定されます。
BIOKA (11) では、宇宙船の方向パラメータが測定されます。
BIUVSVGZ (12) は、宇宙船から見える地球の地平線上の太陽の仰角の値を決定します。
BOMPOSIRPSB (14) は、地球から反射された放射線が SB パネルの作業面に当たる瞬間を決定します。 これを行うために、条件 (5) が満たされているかどうかがチェックされます。 このブロックは、式 (12) を使用した角度の計算、または計算手順 (23) ~ (27) の使用と条件 (3) のチェックなど、より複雑な計算スキームを実装することもできます。 条件 (5)、(3) が満たされると、BOMPOSIRPSB ブロック (14) は OR 要素 (22) の最初の入力に到達するコマンドを生成します。
BOMPOSITPSB (15) は、地球から反射された放射線が SB パネルの背面に当たる可能性がある時刻を決定します。 これを行うために、条件 (6) が満たされているかどうかがチェックされます。 このブロックは、式 (13) を使用した角度の計算、または計算手順 (23) ~ (27) の使用と条件 (10) のチェックなど、より複雑な計算スキームを実装することもできます。 条件 (6)、(10) が満たされると、BOMPOSITPSB ブロック (15) は OR 要素 (22) の 2 番目の入力に到達するコマンドを生成します。
OR要素(22)の2つの入力のいずれかでコマンドが受信されると、OR要素(22)の出力でコマンドが生成され、BOMGSBDEVOSI(16)の対応する入力に送信される。 BOMPOSIRPSB (14) ブロックと BOMPOSITPSB (15) ブロックは同時にコマンドを生成できないことに注意してください。 相互に排他的な幾何学的条件が満たされているかどうかをチェックします。
BOPOSIRPSB (18) では、太陽系の作業面のうち、現在直接太陽放射に照らされている部分の面積が決定されます。 BIOKA (11) からの宇宙船方位パラメータと UPSB (3) からの宇宙船に対する SB の位置角度に関する入力情報に基づいて、BOPOSIRPSB ブロック (18) は計算手順 (56) を実装します。 (57)。
BOMGSBDEVOSI (16) では、地球から反射された SB 放射線の使用の瞬間、つまり地球から反射された放射線の影響下で SB によって追加の電気が生成される瞬間が決定されます。 これらの瞬間は、条件 (54) と、地球から反射された放射線が SB パネルの作業面または背面に当たる条件の同時満たしに対応します (後者の条件は、BOMPOSIRPSB (14) および BOMPOSITPSB (15) で満たされます)ブロック)。 条件 (54) が同時に満たされ、OR 要素 (22) から信号が受信されると、BOMGSBDEVOSI ブロック (16) は NOT 要素 (21) の入力とキーの制御入力に到達するコマンドを生成します ( 20)。
条件 (54) が満たされない場合、または BOMGSBDEVOSI (16) の出力で OR 要素 (22) から信号を受信しない場合、コマンドは生成されません。 次に、NOT 要素 (21) がキー (19) の制御入力に送信されるコマンドを生成します。 この場合、キー(20)は閉じられており、キー(19)は開いている。
キー (19) と (20) のこの状態では、オープン キー (19) を介して BUSES (9) からの制御コマンドが BUSBS ユニット (5) に入り、BUSBS ユニット (5) が SB (1) の方向を制御します。太陽。 BUOSBS (5) は、宇宙船の運動およびナビゲーション制御システム (VCS) に基づいて実装できます (参照)。 衛星制御アルゴリズムの入力情報は次のとおりです。船舶の運動学的輪郭のアルゴリズムによって決定される、宇宙船に関連付けられた座標軸に対する太陽に対する単位方向ベクトルの位置。 UPSBリモコンによる角度の現在の測定値の形で取得される、宇宙船本体に対するSBの位置(3)。 制御アルゴリズムの出力情報は、UPSB(3)の出力軸の軸に対してSBを回転させる指令、回転を停止する指令です。 UPSB リモート コントロール (3) は、SB (1) の位置に関する信号を提供します。
BOMGSBDEVOSI (16) がキー (20) の制御入力と NOT 要素 (21) に到達するコマンドを発行すると、NOT 要素 (21) はキー (19) の制御入力でコマンドを生成しません。 この場合、キー(20)は開いており、キー(19)は閉じている。
この鍵(19)、(20)の状態で、BUSES(9)から公開鍵(20)を介して制御コマンドがBUPSB(17)に送信される。
BUSES (9) から入力 BOUPSB (17) へのコマンドを受信すると、BOUPSB ブロック (17) は、ブロック BOMPOSIRPSB (14) および BOMPOSITPSB (15) から受信したコマンドに応じて、回転角 SB = 0 を計算します。計算手順 (47) ~ (53) を使用します。 この場合も角度は式(12)、(13)または(19)、(23)~(27)を用いて計算される。 計算には、UPSB (3)、DT (8)、BZMTVSBVPSI (13)、BOPOSIRPSB (18)、BIUVSVGZ (12) からの値、I、I s_max 、S s 、g、H o が使用されます。 )、ビボーカ(10)。 =
ブロック BOMPOSIRPSB (14)、BOMPOSITPSB (15)、BOMGSBDEVOSI (16)、BOUPSB (17)、BOPOSIRPSB (18) の実装は、宇宙船飛行制御センター (MCC) のハードウェアとソフトウェアの両方に基づいて可能です。宇宙船に乗り込みます。 BUSES (9) の実装例としては、地球局 (ES) と搭載機器 (BA) で構成される、ヤマル 100 宇宙船のサービス制御チャネル (SCU) 搭載システムの無線手段が考えられます (「BUSES (9)」を参照)。の説明)。 特に、BA SKU と 3D SKU は、宇宙船のオンボード デジタル コンピュータ システム (OBDS) へのデジタル情報 (DI) の発行とその後の確認の問題を解決します。 BCWS は、ブロック BUOSBS (5)、BOUPSB (17)、BRSBZP (6) を制御します。
UPU (4) は、BUOSBS (5)、BRSBZP (6)、UPSB (3) の間のインターフェイスの役割を果たし、デジタル信号をアナログ信号に変換し、アナログ信号を増幅します。
BIVOKA (10)、BIOKA (11)、BIUVSVGZ (12) は、宇宙船のセンサーと機器に基づいて作成できます (参照)。 BZMTVSBVPSI (13)、BOMPOSIRPSB (14)、BOMPOSITPSB (15)、BOMGSBDEVOSI (16)、BOUPSB (17)、BOPOSIRPSB (18) の実装は、BTsVS に基づいて実行できます。 キー (19)、(20)、NOT 要素 (21)、OR 要素 (22) は、基本的なアナログ回路の形式で作成できます。 SB (1)、BFB (2)、UPSB (3)、UPU (4)、BUOSBS (5)、BRSBZP (6)、BRT (7)、DT (8) は、SES 要素に基づいて作成できます (「SES 要素」を参照)。 )。
したがって、システムの基本ブロックの実装例が検討され、その結果に基づいて決定が行われ、提案された操作が実装されます。
提案された発明の技術的効果について説明する。
提案された技術ソリューションは、ソーラーパネルの作業面に到達する直接太陽放射と、ソーラーパネルの作業面または背面に到達する地球から反射した放射のソーラーパネルへの総合的な影響から最大限の発電を保証します。宇宙船の設計要素によってソーラーパネルの作業面に影が生じる可能性を考慮してください。 この場合、提案された時間間隔で、提案された地球から宇宙船に反射される放射線の到達方向によって決定される、太陽の方向から、提案された方法によって決定される計算された角度まで、ソーラーパネルを所定の方向に回転させる。
説明のために、図 8 は、太陽に対する SB の方向を維持しながらの公転中の時間 t (s) に対する SB PC MKC I(A) からの電気の到達のグラフを示しています: 02.02.2004、軌道 1704 、時間 17.35-19.06 DVM、ISK の方向 (参照)。 グラフは、電流レベル I s_max を示し、軌道回転の照明部分の開始と終了に位置し、条件 (3) が満たされる瞬間に対応する時間間隔 T 1、T 2 をマークします。 o 軌道の照らされた部分の中央部分に位置し、条件 (10) が満たされる瞬間に対応します。 グラフは、条件 (54) がこれらの間隔で満たされることを示しています。 SB パネルの表面では、地球から反射された放射線もさらに受信され、SB を計算された角度 = o だけ回転させることで、SB パネルの表面に到達する総放射線の影響を受けて SB の発電量を増加させることができます。
文学
1.エリセーエフA.S. 宇宙飛行技術。 M.: 機械工学、1983 年。
2. Rauschenbach G. ソーラーパネルの設計のためのハンドブック。 M.: エネルギーアトミズダット、1983 年。
3. コフトゥン V.S.、ソロヴィヨフ S.V.、ザイキン S.V.、ゴロデツキー A.A. 宇宙船のソーラーパネルの位置を制御する方法およびその実装のためのシステム。 2003 年 3 月 24 日付けの出願 2003108114/11 に基づく RF 特許第 2242408 号に関する発明の説明。
4. クロシュキン M.G. 宇宙研究の物理的および技術的基盤。 - M.: 機械工学。 1969年。
5.コンドラチェフK.Ya。 アクチノメトリー。 - M.: ギドロメテオイズダット。 1965年。
6. Grilikhes V.A.、Orlov P.P.、Popov L.B. 太陽エネルギーと宇宙飛行。 M.: ナウカ、1984 年。
7. 宇宙船の運動制御およびナビゲーション システム。 技術的な説明。 300GK.12Yu。 0000-ATO。 RSC エネルギア、1998 年。
8. ヤマル宇宙船のサービス制御チャネルの地球局。 マニュアル。 ZSKUGK.0000-0RE。 RSC エネルギア、2001 年。
9. ヤマル宇宙船のサービス制御チャネルの搭載機器。 技術的な説明。 300GK.15Yu。 0000A201-OTO。 RSC エネルギア、2002 年。
10. 宇宙技術に関する工学参考書。 SSR国防省出版社、M.、1969年。
11. 宇宙船の電源システム。 技術的な説明。 300GK.20Yu。 0000-ATO。 RSC エネルギア、1998 年。
12. Rulev D.N.、Stazhkov V.M.、Korneev A.P.、Panteleimonov V.N.、Melnik I.V. 遠隔測定情報に基づく国際宇宙ステーションのロシア部分のソーラーパネルの効率の評価 // 科学遺産の発展と K.E. ツィオルコフスキーのアイデアの発展に特化した XXXIX 読書会の議事録 (カルーガ、9 月 14 ~ 16 日) 、2004)。 セクション「ロケットと宇宙技術の問題」。 - カザン: カザン州立大学にちなんで命名されました。 V.I.ウリヤノフ=レーニン。 2005年。
請求
太陽電池のブロックを搭載した宇宙船の太陽電池パネルの位置を背面の正の出力電力で制御するためのシステムであって、太陽電池パネルを回転させる装置、増幅変換装置、方向制御装置を含むシステム太陽に向かう太陽電池パネルの方向、太陽電池パネルを所定の位置に回転させるユニット、電流調整ブロック、電流センサ、太陽電池ユニットの出力が電流の入力に接続される電源システム制御ユニットレギュレータユニットの出力は電流センサーの入力に接続され、ソーラーパネルの太陽への向きと指定された位置でのソーラーパネルの回転を制御する制御ユニットの出力は、それぞれレギュレータユニットに接続されています。増幅変換装置の第1および第2の入力、その出力はソーラーパネル回転装置の入力に接続され、その出力は太陽に向かうソーラーパネルの向きを制御する制御ユニットの入力に接続される太陽電池パネルを所定の位置に回転させ、太陽電池パネル回転装置の電池が指定された太陽電池に機械的に接続されており、宇宙船の軌道の高度を測定するためのユニットと、宇宙船の軌道の高度を測定するためのユニットとをさらに含むことを特徴とする、宇宙船の向き、宇宙船から見える地球の地平線上の太陽の仰角を測定する単位、太陽の直接放射の影響下で太陽電池によって生成される電流の最大値を設定する単位、単位地球から反射された放射線が太陽電池の作動面に当たる瞬間を決定するためのユニット、地球から反射された放射線が太陽電池の裏面に当たる時間を決定するためのユニット、太陽電池が太陽電池の影響下で追加の電気を生成する時間を決定するためのユニット地球から反射された放射線、ソーラーパネルの回転角度を決定するためのブロック、太陽放射によって照らされたソーラーパネルの作業面の面積を決定するためのブロック、2つのキーと要素「NOT」と「OR」、電流センサーの出力は、太陽電池パネルの回転角度を決定するブロックと、地球から反射された放射線の影響下で太陽電池による追加電気の生成の瞬間を決定するブロックの最初の入力に接続されます。出力と入力 - 2 番目から 4 番目まで - は、それぞれ「NOT」要素の入力と、太陽電池が生成する電流の最大値を設定するためのブロックの出力に接続されます。直接太陽放射、「OR」要素、および太陽放射によって照らされるソーラーパネルの作業面の部分の面積を決定するためのブロック。その第1および第2の入力および出力もそれぞれ、宇宙船の方向を測定するためのユニットの出力、ソーラーパネルを回転させるための装置、およびソーラーパネルの回転角度を決定するためのブロックの2番目の入力、出力と入力 - 3番目から8番目まで - 接続されていますそれぞれ、ソーラーパネルを所定の位置に回転させるためのブロックの2番目の入力とソーラーパネルを回転させるためのデバイスの出力に、次の影響下でソーラーパネルによって生成される電流の最大値を設定するためのブロック直接太陽放射、宇宙船の軌道の高度を測定するためのブロック、地球から太陽電池パネルの作業面と背面に反射された放射線の衝突の瞬間を決定するためのブロック、および太陽の仰角を測定するためのユニット宇宙船から見える地球の地平線上にあり、その出力は、地球から反射された放射線が太陽電池パネルの作業面と背面に当たる瞬間を決定するためのブロックの最初の入力にも接続されており、その2番目の入力は次のとおりです。宇宙船の軌道の高さを測定するユニットの出力に接続され、地球から反射された放射線がソーラーパネルの作業面と背面に当たる瞬間を測定するユニットの出力もそれぞれ接続されています。電源システム制御ユニットの出力は、1 番目と 2 番目のキーの情報入力に接続され、その制御入力は「NOT」要素の出力に接続され、地球から反射された放射線の影響下でソーラーパネルによって追加の電気が発生する瞬間を決定するためのユニットであり、第1キーと第2キーの出力はそれぞれ、太陽方向制御ユニットのバッテリーの第2入力に接続されています。太陽の方向と太陽電池の回転角度を決定するブロックの 9 番目の入力。
太陽光発電所の効率を向上させる明らかな方法の 1 つは、太陽光追跡システムを太陽光発電所に使用することです。 メンテナンスが簡単な追跡システムの開発は、環境の生態学的安全性を確保しながら、農業施設の技術的および経済的パフォーマンスを大幅に向上させ、人々に快適な労働および生活条件を創出します。 追跡システムは、ソーラー パネルの 1 つまたは 2 つの回転軸を使用できます。
小型の光電太陽位置センサーを含む追跡システムを備えた太陽光発電所。直角三角柱の形をしたフレームで構成され、その 2 つの側面には太陽を追跡するための光電池が配置され、3 番目の面には太陽を追跡するための光電池が配置されています。モジュールを西から東に回転させるためのコマンドフォトセルです。 日中は、センサーの端にある追跡光電池が、シャフトを使用して太陽の方向に回転する太陽電池モジュールの方位角回転駆動のためのコマンド信号を制御ユニットに発行します。 この設置の欠点は、太陽を追跡する精度が不十分であることです。
太陽光発電所には、太陽に対する二軸配向システムを備えた太陽電池が搭載されており、その太陽電池には、円筒形フレネルレンズの焦点に配置された線形光検出器を含む光電モジュールが太陽追尾センサーとして設置されています。 光検出器からの信号は、マイクロプロセッサを使用して、太陽電池の方位角および天頂方位システムの駆動を制御します。
この設置の欠点は、太陽追跡の精度が不十分であることと、追跡センサーが太陽電池の活性領域の一部を占有するという事実です。
開発の主な目標は、一年を通して空の太陽の任意の位置における二軸ソーラーパネル配向システムの太陽追跡センサーの精度を向上させることです。
上記の技術的結果は、提案された太陽追尾センサーに太陽電池の二軸配向システムがあり、固定プラットフォーム上に設置された逆円錐の形で作られたビーム受信セルのブロックを含むという事実によって達成されます。不透明な壁を持ち、光電池の円錐の狭い端に取り付けられています。 この場合、ビーム受信セルは、160°の立体角を形成してプラットフォームにしっかりと設置され、プラットフォームに取り付けられた透明な球によって囲まれています。センサーの位置の地理的緯度。
追跡センサーは固定プラットフォームに設置されており、そのうちの通常の 6 個 (図 1) は南に向けられています。 水平ベースに対する敷地の傾斜角は、ステッピング ギア モーターを使用した天頂および方位角回転駆動装置を備えた機械式太陽方位システム上に設置された太陽電池に隣接するエリアの地理的緯度に対応します。 太陽電池ドライブは、センサー セルの光電素子から電気インパルスを受け取るマイクロプロセッサーによって制御されます。 マイクロプロセッサには、太陽電池の位置の地理的緯度に関する情報、カレンダーを備えた電子時計が含まれており、その信号により、運動方程式に従って太陽電池を天頂および方位角で回転させるギアモーターが作動します。空の太陽の。 この場合、センサーセルの光電素子からの信号に基づいて達成された太陽電池の回転角の値が、現在の太陽の運動方程式から得られた値と比較されます。時間。
センサー設計の本質を図に示します。 1、2、3、4。 図 1 と 3 にセンサーの全体図を示します。 図では、 図 2 は、透明な球とビーム受信セルの上面図を示しています。 図では、 図 4 は、そのようなセルの図を示しています。
二軸ソーラーパネル配向システム用の太陽追跡センサーは、領域の緯度に等しい角度αで水平ベース5に取り付けられたプラットフォーム1を含む。 半径rの透明な半球2がプラットフォーム1に取り付けられている。球2の内部空間全体には、内壁に面して不透明な壁7を備えた逆円錐形のビーム受光セル3が密に固定されている。直径 φ の透明球 2 の直径 d2サイト 1 までの距離。コーン 3 の高さは距離に等しい。 h球2の内壁からプラットフォーム1の表面まで。円錐3の上端から5d1の距離にある円錐3の下部には、光電素子4があり、そこから電気信号が送られる。は、太陽電池軸(図1には示されていない)の回転を制御するためのマイクロプロセッサシステムに送信される。 距離5d 1 は、円錐3の不透明な壁7によって制限されながら、太陽光線8が光電素子4上に正確に捕捉されるように選択される。
太陽追跡センサーは次のように動作します。 太陽光線8は、透明な球2、円錐3の内部空間を貫通し、光起電素子4に当たり、電流を生じさせます。この電流は、マイクロプロセッサによって分析され、太陽電池のステッピングモーターギアドライブに送信されます。方向システム (図には示されていません)。 太陽が空を横切って移動するにつれて、その光線8が徐々に光電素子3をオンにし、方位軸および天頂軸に沿った太陽電池の回転の正確かつ円滑な制御に寄与する。
日射シミュレーターを使用したセンサーセルのレイアウトの実験室テストでは、許容値の光束を遮断するという許容可能な結果が示されました。 d 1 , d 2と5 dバツ。
二軸太陽電池方位システムの太陽追跡センサーには、逆円錐の形で作られたビーム受信セルが含まれており、160°の立体角を形成するように現場にしっかりと設置され、透明な球で囲まれているため、より正確な方位を測定できます。ソーラーパネルを設置し、そこから最大量の電力を受け取ります。