1. att. Kaskādes PID temperatūras regulatora uzbūve reaktora apvalkā
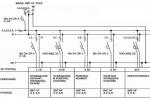
 2. att. Kaskādes PID temperatūras regulatora uzbūve reaktora atteces dzesētājā
2. att. Kaskādes PID temperatūras regulatora uzbūve reaktora atteces dzesētājā
1. Regulatori
Vispārīgi punkti
– Vadības apakšsistēma sastāv no četriem PID regulatoriem, kas veido divas vadības kaskādes (1. att., 2. att.);
– Galvenā un pakārtotā regulatoru vadība (darba režīma un iestatījuma maiņa) ir atļauta vienmēr, neatkarīgi no tā, vai reaktors darbojas vai ne, gan no “Instalācijas statusa” mnemoniskās diagrammas, gan no regulatora logiem;
Regulatora dublēšana
– Lai palielinātu uzticamību, sistēma nodrošina liekus regulatorus. Galvenais ir programmatūras kontrolieris, rezerves ir aparatūras kontrolieris (SIPART DR22).
– Aparatūras kontrollera koeficientu maiņa (pārraides koeficients, integrācijas laika konstante un diferenciācijas laika konstante) atbilstoši programmatūras kontrollera iestatījumiem tiek veikta, programmatūras kontrollera iestatījumu logā nospiežot pogu "Lietot";
Programmatūras kontrollera struktūra
Programmatūras kontrollera struktūra ir parādīta 1., 2. att.
Regulatora kontrole
– Visi četri reaktora regulatori tiek vadīti no regulatora logiem vai no imitācijas diagrammas “Instalācijas statuss”. Logu izskats parādīts 1. att., 2. att.
– Katram no četriem reaktora regulatoriem ir atsevišķs logs, kuram ir divas formas: galvenais ir “regulatora vadības logs” un papildu logs ir “regulatora iestatījumu logs”. Pārslēgšanās starp šīm formām tiek veikta, nospiežot pogas vai logu augšējā labajā apgabalā.
– Nospiežot pogu “RAMP” (pieejama tikai uz ledusskapja vadošā regulatora loga), atveras rampas iestatījumu un vadības logs (skat. 2. att.).
– Pati rampa ir lineāras temperatūras atsauces izmaiņas no “Sākotnējās vērtības” uz “Galīgās vērtības” vērtību “Pārejas laika” laikā;
– Rampas iestatīšanas un vadības logs ir paredzēts, lai uzraudzītu rampas gaitu, kā arī nodrošina operatoram iespēju kontrolēt rampu;
– Sākotnējā stāvoklī, kad rampa ir neaktīva, ir nospiesta poga “Stop”, pogas “Sākt” un “Pauze” ir nospiestas, poga “Pauze” nav pieejama, “Galīgā vērtība” un “Pārejas laiks” ievadīšanai ir pieejami lauki, laukā “Sākotnējā vērtība” tiek parādīta pašreizējā temperatūras vērtība, laukos “Pagājušais laiks” un “Atlicis laiks” – nulle;
– Kad rampa ir aktīva, tiek atlaistas pogas “Stop” un “Pause”, tiek nospiesta poga “Start”, ir pieejama poga “Pauze”, visi lauki nav pieejami ievadīšanai.
Laukā "Sākotnējā vērtība" tiek parādīta temperatūras vērtība, no kuras sākās vienmērīgas regulatora iestatījumu maiņa pēc pogas "Start" nospiešanas vai rampas sistēmas palaišanas.
Laukā Beigu vērtība tiek parādīta kontrollera atsauces vērtība, kas tiks iestatīta pēc rampas pabeigšanas.
Laukā "Pārejas laiks" tiek parādīts kopējais rampas laiks, laukā "Pagājušais laiks" tiek parādīts pagājušais rampas laiks, un laukā "Atlikušais laiks" tiek parādīts atlikušais rampas laiks;
– Pēc "Pārejas laika" laika beigām kontrollera iestatījums ir vienāds ar vērtību "Galīgā vērtība", ievades lauki un pogas atgriežas sākotnējā stāvoklī;
Operatora veikta rampas veikšana
– Sistēmai ir iespēja veikt rampu pēc operatora komandas ar operatora norādītajiem iestatījumiem;
– Pirms rampas palaišanas operators ievada vajadzīgās vērtības laukos “Beigu vērtība” un “Pārejas laiks”;
– No polimerizācijas fāzes sākuma līdz pirmās plānotās papildu ūdens dozēšanas sākumam operatoram laukā “Gala vērtība” ir aizliegts ievadīt vērtību, kas ir lielāka par pašreizējo temperatūru reaktorā.
Ja reaktors darbojas, pirms polimerizācijas fāzes sākuma un no brīža, kad sākas pirmā plānotā papildu ūdens dozēšana, rampas iestatījumu un vadības loga ievades lauki operatoram nav pieejami, rampas vadības pogas. operatoram nav pieejami nospiešanai.
Ja reaktors nedarbojas, ievades lauki rampas iestatījumos un vadības logā ir pieejami operatora ievadīšanai, rampas vadības pogas ir pieejamas operatora nospiešanai;
– Lai palaistu rampu, operators nospiež pogu “Start”, kamēr tiek nospiesta poga “Stop”;
– Rampas laikā izvades laukā “Sākotnējā vērtība” tiek parādīta temperatūras vērtība, no kuras sākās vienmērīga regulatora iestatījumu maiņa pēc pogas “Start” nospiešanas;
– Ja rampas laikā ir jāmaina tās parametri (galīgā vērtība vai pārejas laiks), jānospiež poga “Pauze”. Šajā gadījumā poga “Start” paliek nospiesta, poga “Stop” paliek nospiesta, un ievadei ir pieejami ievades lauki “Galīgā vērtība” un “Pārejas laiks”. Kontroliera iestatījumu maiņa ar RAMP apakšprogrammu un pagājušā laika skaitīšana laukā "Pagājušais laiks" tiks īslaicīgi apturēta;
– Pēc jauno rampas parametru ievadīšanas ievades laukos operators nospiež pogu “Pauze”, vērtība laukā “Atlikušais laiks” tiek automātiski pārrēķināta un notiek vienmērīga uzdevuma maiņa ar jauniem parametriem un laika atpakaļskaitīšana. rampas laiks laukā “Pagājušais laiks” tiek atsākts;
– Jaunā vērtība laukā “Atlicis laiks” tiek aprēķināta šādi: . Ja rampa pirms pogas "Pauze" nospiešanas ilga ilgāk, nekā pauzes laikā tika ievadīts laukā "Pārejas laiks", atlikušais laiks tiek uzskatīts par vienādu ar nulli, kontrollera iestatījums tiek iestatīts vienāds ar vērtību "Galīgais". vērtība" lauks;
– Divos gadījumos: nospiežot pogu “Sākt” un nospiežot pogu “Pauze”, uzdevums vadošajam regulatoram jakā tiek iestatīts uz vienu grādu mazāks par rampas “Gala vērtību”;
Regulatoru darbība
– Visiem četriem reaktora regulatoriem ir divi darbības režīmi: manuālais un automātiskais. Manuālajā režīmā atgriezeniskā saite ir atvērta, PID algoritms nedarbojas, operatoram un sistēmai ir iespēja mainīt vārsta vadības darbību. Automātiskajā režīmā atgriezeniskā saite ir aizvērta, darbojas PID algoritms, operatoram un sistēmai ir iespēja mainīt temperatūras mērķi;
– Četri reaktora regulatori ir apvienoti divās kaskādes vadības ķēdēs, no kurām katrai ir galvenais un palīgregulators. Kaskāde tiek uzskatīta par slēgtu, ja pakārtotie un galvenie kontrolleri ir automātiskajā režīmā;
– Galvenais regulators nevar būt automātiskās vadības režīmā, ja pakārtotais ir manuālajā režīmā. Ja operators vai sistēma pārslēdz palīgkontrolieri manuālajā režīmā, arī galvenais pārslēgsies uz manuālo režīmu un atveras kaskāde. Ja operators vai sistēma pārslēdz vergu kontrolieri uz automātisko režīmu, galvenais režīms nemainās (paliek manuāli), kaskāde paliek atvērta. Galveno kontrolieri var pārslēgt uz automātisko režīmu tikai tad, ja pakārtotais ir automātiskajā režīmā;
– Kad galvenais regulators ir ieslēgts automātiskajā režīmā, kaskādes slēgšana bez triecieniem tiek nodrošināta, iepriekš iestatot galvenā regulatora vadības darbību, kas ir vienāda ar pakārtotā regulatora uzdevumu.
Lūdzu, ņemiet vērā, ka ražotāja garantija ir spēkā tikai tad, ja uzstādīšanu un nodošanu ekspluatācijā ir veicis Protherm rūpnīcā sertificētas specializētas organizācijas darbinieks. Tajā pašā laikā Protherm sertifikāta klātbūtne neizslēdz nepieciešamību pēc specializētas organizācijas personāla papildu sertifikācijas saskaņā ar Krievijas Federācijas teritorijā spēkā esošajiem normatīvajiem aktiem, kas attiecas uz uzņēmuma darbības jomu. šī organizācija.
Spēkā esošajos tiesību aktos noteikto garantijas saistību izpildi reģionā, kurā tika uzstādīts Protherm aprīkojums, veic jūsu ierīces pārdevējs vai ar to saistīta organizācija, kas ar īpašu līgumu pilnvarota veikt Protherm produktu garantijas un bezgarantijas remontu. . Remontu var veikt arī organizācija, kas ir pilnvarots Protherm servisa centrs.
Uzņēmums, kas veic Protherm iekārtu garantijas vai negarantijas remontu, garantijas laikā bez maksas novērsīs visus tā konstatētos trūkumus, kas radušies ražotāja vainas dēļ. Konkrēti garantijas nosacījumi un garantijas perioda ilgums tiek noteikti un dokumentēti ierīces pārdošanas un nodošanas ekspluatācijā laikā. Lūdzam pievērst uzmanību nepieciešamībai aizpildīt sadaļu “Pārdošanas informācija”, kurā norādīts ierīces sērijas numurs, tirdzniecības zīmes un atbilstošās plombas, pārdošanas datumi un pārdevēja paraksts garantijas kartēs, kas atrodas preces pases aizmugurē. .
Ražotāja garantija neattiecas uz precēm, kuru darbības traucējumus izraisījuši transportēšanas bojājumi, transportēšanas un uzglabāšanas noteikumu pārkāpumi, pretaizsalšanas dzesēšanas šķidrumu lietošana, jebkāda veida piesārņojums, ieskaitot cietības sāļus, ūdens sasalšana, nekvalificēta uzstādīšana un/vai nodošana ekspluatācijā, ekspluatācijas instrukciju neievērošana.iekārtu un piederumu uzstādīšana un ekspluatācija un citi no ražotāja neatkarīgu iemeslu dēļ, kā arī ierīces uzstādīšana un apkope.
Noteiktais kalpošanas laiks tiek aprēķināts no nodošanas ekspluatācijā brīža un norādīts konkrētajai precei pievienotajā dokumentācijā.
Protherm rūpnīca garantē iespēju iegādāties jebkuras rezerves daļas šim produktam vismaz 8 gadus pēc tā ražošanas pārtraukšanas.
Protherm aprīkojumam un piederumiem ražotājs nosaka garantijas periodu 2 gadi no nodošanas ekspluatācijā, bet ne vairāk kā 2,5 gadi no pārdošanas datuma gala patērētājam.
Garantija rezerves daļām ir 6 mēneši no mazumtirdzniecības datuma ar nosacījumu, ka rezerves daļas uzstāda Protherm sertificēts speciālists.
Ja ir daļēja vai pilnīga ar dokumentiem apliecinātas informācijas par pārdošanu un/vai nodošanu ekspluatācijā trūkums, garantijas laiks tiek skaitīts no ierīces izgatavošanas datuma. Preces sērijas numurs satur informāciju par izgatavošanas datumu: cipari 3 un 4 - izgatavošanas gads, cipari 5 un 6 - ražošanas gada nedēļa.
Organizācijai, kas ir autorizēts Protherm servisa centrs, ir tiesības galapatērētājam atteikt garantijas remontu trešās personas pasūtītām iekārtām, ja autorizētā servisa centra speciālists atklāj iepriekš minētos iemeslus, kas izslēdz ražotāja garantiju.
To lieto sarežģītiem objektiem, ja izvades parametru j ietekmē vairāki traucējumi, kurus nevar izmērīt. Šajā gadījumā tiek izvēlēts objekts ar starpparametru j 1, ko var izmērīt, un uz tā pamata notiek objekta regulēšana. Mēs iegūstam pirmo vadības cilpu. Šis kontrolieris neņem vērā dažus traucējumus, kas iedarbojas uz sarežģītu objektu, kas ietekmē izejas parametru j. Izmantojot parametru j, tiek konstruēta otrā vadības cilpa. Otrās ķēdes regulators kontrolē pirmās ķēdes regulatora darbību, mainot tā uzdevumu tā, lai tā darbība kompensētu traucējumu ietekmi uz izejas parametru j. Tā ir kaskādes regulēšanas nozīme (1. un 2. regulēšanas kaskāde).
Rīsi. 5.18. Ūdens līmeņa kontroles sistēmas shēma katla cilindrā:
N b – ūdens līmenis katla tvertnē; D pp – pārkarsēta tvaika patēriņš (l); W c – barības ūdens patēriņš (m tilp.); ZD– iestatīt rādītāju (iestata līmeņa vērtību N b,0); WEC – ūdens ekonomaizers; PP – pārkarsētājs
Apskatīsim to kompleksa objekta vadības shēmā, kas sastāv no trīs objektu secīga savienojuma ar traucējumiem (5.19. att.).
Starpparametra j 1 regulators cenšas to uzturēt nemainīgu un vienādu ar j 1,0. Šī ir 1. regulēšanas kaskāde.
Šis kontrolieris ņem vērā tikai traucējumus l 1. Traucējumi l 2 un l 3 ietekmēs izvades parametru j. Regulators j (2. vadības kaskāde) saglabās parametru j nemainīgu j 0, jo ar mainīgā uzdevuma uzdevumu ( ZPZ) mainīs uzdevumu uz pirmo ķēdi par summu ±Dj 1 . Saņemot šo uzdevuma papildinājumu, kontrolieris j 1 mainīs parametru j 1 tā, lai kompensētu traucējumu l 2 un l 3 ietekmi uz izejas parametru j. Regulators j (2. pakāpe) it kā izlabo pirmā regulatora darbību (saskaņā ar j 1), tātad sauc par korektīvo regulatoru (CR).

Rīsi. 5.19. Kaskādes vadības shēma:
ZD– meistars; ZPZ– mainīgo atsauces ģenerators; KR – koriģējošais regulators
Kaskādes vadības piemērs ir siltuma slodzes sadale starp vairākiem katliem, kas darbojas uz kopējas tvaika maģistrāles (5.20. att.).

Rīsi. 5.20. Uz kopējās tvaika maģistrāles strādājošo katlu siltumslodzes regulēšana: RSZ – iestatīts signāla reizinātājs; GKR - galvenais koriģējošais regulators
Divi katli piegādā tvaiku tvaika maģistrālei ar plūsmas ātrumiem D k1 un D k2. No tvaika maģistrāles tvaiks plūst uz turbīnām T 1 ; T 2 un T 3 ar izdevumiem D T1; D T2 un D T3. Ja ir līdzsvars ienākošā tvaika plūsmas no katliem un izejot no galvenās līnijas uz turbīnām, tad tvaika spiediens galvenajā līnijā R m nemainīsies ( R m,0).
Ja turbīnas sāk patērēt vairāk vai mazāk tvaika, tiek izjaukts līdzsvars starp tvaika ieplūdi galvenajā līnijā un tā plūsmu no galvenās līnijas, un spiediens R m ir jāregulē. Starpposma objekti šajā sistēmā ir katli UZ 1 un UZ 2, un starpparametri ir apkures katlu termiskās slodzes D q 1 un D q2. Pamatojoties uz tiem, tiek uzbūvēts termiskās slodzes regulators ( RTN), kas kontrolē degvielas (gāzes) padevi. Šī ir pirmā regulējuma kaskāde.
Regulatori uztur nemainīgas termiskās slodzes D q 1.0 un D q 2,0, un tādējādi tvaika patēriņš D k1 un D k2. Ja spiediens līnijā R m sāk mainīties (parametrs j), iedarbojas spiediena regulators R m (šī ir 2. kaskāde), kas atkarībā no spiediena novirzes ±D R m =( R m - R m,0) ģenerē signālu izejā un caur atsauces signāla reizinātāju ( RSZ) kontrolē katla siltuma slodzes regulatoru darbību ( RTN), mainot uzdevumu par vērtību ±D D q. Saskaņā ar šo signālu PTH regulatori maina degvielas padevi katliem un līdz ar to tvaika patēriņu. D k1 un D k2 tādā veidā, lai atjaunotu spiedienu līnijā R m.
Gadījumā, ja šīs kontroles metodes nedod vēlamos rezultātus, tās iet uz traucējumu ierobežošanu l.
Kaskādes sistēmas tiek izmantotas, lai automatizētu objektus, kuriem ir liela inerce gar vadības kanālu, ja ir iespējams izvēlēties starpkoordinātu, kas ir mazāk inerciāla attiecībā pret visbīstamākajiem traucējumiem un izmantot tai to pašu regulējošo darbību kā galvenajam izvadam. no objekta.
Šajā gadījumā vadības sistēma (19. att.) ietver divus regulatorus - galveno (ārējo) regulatoru. R, kas kalpo objekta galvenās izejas stabilizēšanai y, un papildu (iekšējais) regulators R 1, kas paredzēts palīgkoordinātas regulēšanai plkst 1 .Papildu kontrollera mērķis ir galvenā kontrollera izejas signāls.
Regulējošo likumu izvēli nosaka regulatoru mērķis:
Lai saglabātu galveno izvades koordinātu noteiktā vērtībā bez statiskas kļūdas, galvenā kontrollera vadības likumā jāiekļauj neatņemama sastāvdaļa;
Papildregulatoram ir jāreaģē ātri, tāpēc tam var būt jebkurš kontroles likums.
Salīdzinot vienas ķēdes un kaskādes ASR, redzams, ka, pateicoties lielākam iekšējās cilpas ātrumam kaskādes ASR, pārejas procesa kvalitāte palielinās, īpaši kompensējot traucējumus, kas nāk caur vadības kanālu. Ja saskaņā ar procesa apstākļiem tiek uzlikts ierobežojums papildu mainīgajam lielumam (piemēram, temperatūra nedrīkst pārsniegt maksimāli pieļaujamo vērtību vai plūsmas ātruma attiecībai jābūt noteiktās robežās), tad ierobežojums tiek noteikts arī galvenā kontrollera izejas signāls, kas ir palīgkontrolera uzdevums. Lai to izdarītu, starp regulatoriem ir uzstādīta ierīce ar pastiprinātāja sekcijas īpašībām ar piesātinājumu.
Rīsi. 19. Kaskādes automatizētās vadības sistēmas blokshēma:
W, W 1 – galvenie un palīgkanāli plkst 1 objekta kontrolētos daudzumus; R, R 1 – galvenie un palīgregulatori; х Р, х Р1 – regulatoru regulējošās ietekmes R Un R 1 ; ε, ε 1 - neatbilstību lielums starp kontrolēto lielumu pašreizējo un iestatīto vērtību plkst Un plkst 1 ; plkst 0 – uzdevums galvenajam kontrolierim R
Termotehnoloģiju iekārtu kaskādes automatizēto vadības sistēmu piemēri. Attēlā 20. attēlā parādīts kaskādes sistēmas piemērs šķidruma temperatūras stabilizēšanai pie siltummaiņa izejas, kurā palīgkontūra ir apkures tvaika plūsmas ASR. Ja rodas tvaika spiediena traucējumi, regulators 1 maina vadības vārsta atvēršanas pakāpi tā, lai saglabātu norādīto plūsmas ātrumu. Ja aparātā ir traucēts termiskais līdzsvars (ko izraisa, piemēram, ieejas temperatūras vai šķidruma plūsmas ātruma izmaiņas, tvaika entalpija, siltuma zudumi vidē), izraisot izejas temperatūras novirzi no iestatītās vērtības, temperatūras regulators 2 pielāgo iestatījumu tvaika plūsmas regulatoram 1.
Termotehnoloģiskos procesos bieži vien galvenajām un palīgkoordinātēm ir vienāds fiziskais raksturs un tās raksturo viena un tā paša tehnoloģiskā parametra vērtības dažādos sistēmas punktos (21. att.).
20. att. Kaskādes temperatūras kontroles sistēma (2. pozīcija) ar uzdevuma korekciju tvaika plūsmas regulatoram (1. pozīcija)

Rīsi. 21. Kaskādes ASR blokshēma ar palīgkoordinātas mērījumu starppunktā
Attēlā 22. attēlā parādīts procesa plūsmas diagrammas fragments, ieskaitot reakcijas maisījuma sildītāju 2 un reaktoru 1, kā arī temperatūras stabilizācijas sistēmu reaktorā.
Tvaika plūsmas kontroles efekts tiek piegādāts siltummaiņa ieejā. Vadības kanāls, kas ietver divas ierīces un cauruļvadus, ir sarežģīta dinamiska sistēma ar augstu inerci. Objektu ietekmē vairāki traucējumi, kas nonāk dažādos sistēmas punktos: tvaika spiediens un entalpija, reakcijas maisījuma temperatūra un plūsmas ātrums, siltuma zudumi reaktorā uc Lai palielinātu vadības sistēmas ātrumu, kaskādes ACS tiek izmantots, kurā galvenais regulējamais lielums ir temperatūra reaktorā, un kā palīgs tika izvēlēta siltummaiņa un reaktora maisījuma temperatūra.
Rīsi. 22. Kaskādes temperatūras kontroles sistēma (4. poz.) reaktorā (1. poz.) ar temperatūras regulatora iestatījuma korekciju (3. poz.) siltummaiņa izejā (2. poz.)
Kaskādes ASR aprēķins. Kaskādes ASR aprēķins ietver galveno un papildu regulatoru iestatījumu noteikšanu objekta dotajiem dinamiskajiem raksturlielumiem galvenajos un papildu kanālos. Tā kā galvenā un papildu regulatoru iestatījumi ir savstarpēji atkarīgi, tos aprēķina, izmantojot iterācijas metodi.
Katrā iterācijas solī tiek aprēķināts samazināts vienas cilpas ASR, kurā viens no kontrolleriem nosacīti atsaucas uz līdzvērtīgu objektu. Kā redzams no blokshēmām attēlā. 23, līdzvērtīgs objekts galvenajam regulatoram (23. att., a) ir slēgtas palīgķēdes un galvenā vadības kanāla virknes savienojums; tā pārsūtīšanas funkcija ir vienāda ar
 (93)
(93)

Rīsi. 23. Līdzvērtīgas vienas ķēdes vadības sistēmas ar galveno (a) un palīgregulatoru (b) blokshēmas: augšpusē - līdzvērtīga vienas ķēdes shēma; zemāk – kaskādes ACP pārveidošana uz vienas ķēdes
Līdzvērtīgs objekts palīgkontrolierim 2 (23. att.) ir palīgkanāla un galvenās atvērtās cilpas sistēmas paralēlais savienojums. Tās pārsūtīšanas funkcijai ir šāda forma:
(p)=W 1 (p) – W(p)R(p).(94)
Aprēķins sākas ar galveno regulatoru. Metode tiek izmantota gadījumos, kad palīgkanāla inerce ir daudz mazāka nekā galvenajam. Pirmajā posmā tiek pieņemts, ka galvenās ķēdes darbības frekvence ( ω p) daudz mazāks nekā palīgs ( ω p1) un plkst ω=ω р
 . (95)
. (95)
 . (96)
. (96)
Tādējādi, kā pirmo tuvinājumu, iestatījumi S 0 galvenais regulators 1 nav atkarīgs no R1(p) un atrodas līdz W e °(p).
Otrajā solī tiek aprēķināti papildu kontrollera iestatījumi ekvivalentam objektam (1) ar pārsūtīšanas funkciju W 1 e (p), ko tie aizstāj R(p,S°).
Apvienotā ĀKK
Kombinētās automatizētās vadības sistēmas tiek izmantotas objektu automatizācijā, kas pakļauti būtiskiem kontrolētiem traucējumiem. Sistēmas tiek sauktas par kombinētām, jo to uzbūvē tiek izmantoti divi regulēšanas principi: “ar novirzi” (Polzunova princips) un “ar traucējumiem” (Ponceleta princips). Sistēmām, kas veidotas pēc Polzunova principa, ir negatīva atgriezeniskā saite un tās darbojas slēgtā ciklā. Traucējumu (Poncelet) sistēmām nav atgriezeniskās saites un tās darbojas atklātā kontūrā.
Ir divi veidi, kā izveidot kombinētas automatizētas vadības sistēmas ar blokshēmām, kas parādītas attēlā. 24 un 25. Kā redzams no šīm blokshēmām, abām sistēmām ir kopīgas iezīmes: divu kanālu klātbūtne, kas ietekmē objekta izejas koordinātu, un divu vadības cilpu izmantošana - slēgta (caur regulatoru 1 ) un atvērts (caur kompensatoru 2 ). Vienīgā atšķirība ir tāda, ka otrajā gadījumā koriģējošais impulss no kompensatora tiek piegādāts nevis objekta ievadei, bet gan regulatora ieejai.

Rīsi. 24. Kombinētā ASR blokshēmas, pieslēdzot kompensatora izeju ar objekta ieeju: a – oriģinālā diagramma; b – pārveidota diagramma; 1 – regulators; 2 – kompensators

Rīsi. 25. Kombinētā ASR blokshēmas, pieslēdzot kompensatora izeju regulatora ieejai: a – oriģinālā ķēde; b – pārveidota diagramma; 1 – regulators; 2 – kompensators
Korektīva impulsa ieviešana spēcīgākajiem traucējumiem var ievērojami samazināt dinamiskās vadības kļūdu, ja ir pareizi izvēlēta un aprēķināta dinamiskā ierīce, kas veido likumu šīs ietekmes mainīšanai.
Pamats šādu sistēmu aprēķināšanai ir nemainības princips: sistēmas izejas koordinātas novirzei no noteiktās vērtības jābūt vienādai ar nulli jebkuras braukšanas vai traucējošas ietekmes gadījumā.
Lai izpildītu invariances principu, ir nepieciešami divi nosacījumi: ideāla visu traucējošo ietekmju kompensācija un ideāla uzdevuma signāla reproducēšana. Ir skaidrs, ka absolūtas nemainības sasniegšana reālās vadības sistēmās ir praktiski neiespējama. Parasti tie aprobežojas ar daļēju nemainīgumu attiecībā uz visbīstamākajiem traucējumiem. Apskatīsim atvērtā cikla un kombinētās vadības sistēmu nemainīguma nosacījumu attiecībā uz vienu traucējošo ietekmi.
Nemainības nosacījums atvērtai cilpai un kombinētajam ASR. Apskatīsim atvērtās cilpas sistēmas invariances nosacījumu (26. att.): y(t)= 0.

Rīsi. 26. Atvērtās cilpas automātiskās vadības sistēmas blokshēma
Pārejam uz Laplasa attēliem X B (r) Un J(p) signāliem x V (t) Un y(t), Pārrakstīsim šo nosacījumu, ņemot vērā objekta pārneses funkcijas pa traucējumu kanāliem WB(p) un regulējums W Р (p) un kompensators RK(p):
Y(p) = X B (p) 0. (97)
Traucējumu klātbūtnē[  ] nemainīguma nosacījums (97) ir izpildīts, ja
] nemainīguma nosacījums (97) ir izpildīts, ja
W B (p) + R k (p) W P (p) = 0,(98)
R k () = -W В ()/W Р ().(99)
Tādējādi, lai nodrošinātu vadības sistēmas nemainību attiecībā uz jebkādiem traucējumiem, nepieciešams uzstādīt dinamisko kompensatoru, kura pārneses funkcija ir vienāda ar objekta pārneses funkciju attiecību pa traucējumu un vadības kanāliem, ņemot vērā ar pretēju zīmi.
Atvasināsim invariances nosacījumus kombinētajiem ASR. Gadījumā, ja signāls no kompensatora tiek piegādāts objekta ievadei (sk. 24. att., a), kombinētās ASR blokshēma tiek pārveidota par atvērtas cilpas sistēmas un slēgtas cilpas virknes savienojumu ( sk. 24. att., b), kuru pārsūtīšanas funkcijas ir attiecīgi vienādas:
 .
.
Šajā gadījumā nemainīguma nosacījumu (97) raksta šādi:
Ja X B (p) 0 un W ZS p), ir jāievēro šāds nosacījums:
tie. nemainīguma nosacījums.
Lietojot kombinēto vadības sistēmu (sk. 25. att., a), invariances nosacījumu atvasināšana noved pie sakarībām. ( sk. 25. attēlu, b):
 (101)
(101)
Ja XB(p)0 Un W ZS (r) , tad ir jāievēro šāds nosacījums:
R līdz (p) = -W B (p) /.(103)
Tādējādi, savienojot kompensatora izeju ar kontroliera ieeju, kompensatora pārsūtīšanas funkcija, kas iegūta no nemainīguma nosacījuma, būs atkarīga ne tikai no objekta, bet arī kontroliera īpašībām.
Nemainīgo ASR fiziskās realizācijas nosacījumi. Viena no galvenajām problēmām, kas rodas, konstruējot invariantās vadības sistēmas, ir to fiziskā realizējamība, t.i. kompensatora iespējamība, kas atbilst nosacījumiem (99) vai (103).
Atšķirībā no parastajiem rūpnieciskajiem regulatoriem, kuru struktūra ir dota un ir nepieciešams tikai aprēķināt to iestatījumus, dinamiskā kompensatora struktūru pilnībā nosaka objekta dinamisko raksturlielumu attiecība gar traucējumu un vadības kanāliem un var izrādīties. būt ļoti sarežģītam, un, ja šo īpašību attiecība ir nelabvēlīga, fiziski neiespējama.
“Ideālie” kompensatori ir fiziski nerealizējami divos gadījumos:
Ja tīrais aizkaves laiks gar vadības kanālu ir lielāks nekā traucējumu kanālā. Šajā gadījumā ideālajam kompensatoram jāietver vadošā saite, jo, ja:
 (104)
(104)
 , (105)
, (105)
tad ņemot vērā (99):
 (106)
(106)
Ja kompensatora pārneses funkcijā polinoma pakāpe skaitītājā ir lielāka par polinoma pakāpi saucējā. Šajā gadījumā kompensatoram jābūt ideālām diferencējošām saitēm. Šo rezultātu iegūst noteiktai diferenciālvienādojumu kārtu attiecībai, kas apraksta traucējumus un vadības kanālus. Ļaujiet
W В (р) = В в (Р)/ Un Wp(p)= В р(Р)/,(107)
Kur B (P), A B (p), V P (p), A P (p)- grādu polinomi t V, n B, m P Un n lpp attiecīgi.

m K = m B + n p ; n k = n in + m r.
Tādējādi invarianta ASR fiziskās realizējamības nosacījums ir, lai būtu izpildītas šādas attiecības:
τ in ≥ τ р un m B + n p ≤ n in + m р.(108)
Piemērs. Apskatīsim temperatūras kontroles sistēmu ķīmiskajā reaktorā ar maisīšanas ierīci, kurā notiek eksotermiska reakcija (27. att.).
Rīsi. 27. Ķīmiskā reaktora ar maisīšanas ierīci shematiskā diagramma: 1 – temperatūras mērītājs; 2 – vadības vārsts; 3 – plūsmas mērītājs
Ļaujiet galveno traucējumu kanālu - "reakcijas maisījuma plūsmas ātrumu - temperatūru reaktorā" - aproksimēt ar divām pirmās kārtas periodiskām saitēm, bet vadības kanālu - "dzesēšanas šķidruma plūsmas ātrumu - temperatūru reaktorā" - ar trīs pirmās kārtas periodiskas saites:
 , (109)
, (109)
 , (110)
, (110)
Kur T 1 , T 2 , T 3 – reaktora galveno termotvertņu, termometra un dzesēšanas apvalka lielākās laika konstantes.
Lai izveidotu nemainīgu vadības sistēmu, kas atbilst izteiksmei (99), ir jāievieš kompensators ar pārsūtīšanas funkciju:
 , (111)
, (111)
kas ir fiziski nerealizējams, jo šajā gadījumā nosacījums tiek pārkāpts un kompensatoram jābūt ideālai diferencējošai saitei.
Vingrinājums
Saskaņā ar piemēru izstrādājiet rektifikācijas iekārtas vadības sistēmu. Aprēķināt  , .
, .
Sākotnējie dati.
1. Destilācijas iekārtas diagramma (28. att.). Iekārta sastāv no destilācijas kolonnas UZ, siltummainis sākotnējā maisījuma sildīšanai T-1, katls T-2, kondensators T-3 un atteces tvertne E.
Kolonna atdala bināro maisījumu. Atdalīto komponentu viršanas temperatūras būtiski atšķiras, kā rezultātā kolonnai ir mazs plākšņu skaits un neliels augstums. Aizkavēšanās un inerce traucējošo un kontroles ietekmju pārraides kanālos ir salīdzinoši neliela. Pastāv spēcīgas iekšējas saiknes starp procesa galvenajiem kontrolētajiem (regulētajiem) daudzumiem - destilāta un grunts produkta sastāviem (temperatūrām).
Tvaika plūsmā, kas iziet no destilācijas kolonnas augšdaļas, ir sastāvdaļas, kas T-3 siltummaiņa darbības apstākļos nekondensējas inertās gāzēs. Tie tiek izvadīti no apūdeņošanas tvertnes pūšanai (degvielas tīklā).
Instalācijas darbības režīms ir pakļauts lieliem un biežiem traucējumiem: plūsmas ziņā F un sastāvs X F izejvielas; pēc siltummaiņa spiediena (plūsmas), kas tiek piegādāts T-I siltummainim un T-2 katlam; atbilstoši kondensatoram T-3 piegādātā aukstumaģenta spiedienam (plūsmai).
Rektifikācijas procesa “galvenās” vadības ierīces ir regulējošās iestādes, kas atrodas kolonnas atteces padeves līnijā UZ un apkures aģenta padeves līnijas uz T-2 katlu.

Rīsi. 28. Rektifikācijas iekārtas shēma
2. Tiek iestatīti objekta dinamiskie parametri: (laika konstantes T; kavējumi τ; pārraides koeficients UZ v) pa kanāliem:
A. “regulatora stāvokļa maiņa P01 – izejvielu patēriņš F» (X R 1 F);
b. “regulatora stāvokļa maiņa P02 – sildītāja patēriņš F 1" (X R 2 F 1 );
b*. “regulatora stāvokļa maiņa P02 - izejvielu temperatūra θ F pēc T-1" (X R 2 θ F);
V. “pārvaldes iestādes pozīcijas maiņa P03 - destilāta sastāvs X D» (X R 3 X D);
d. “regulatora stāvokļa maiņa P04 - spiediens R kolonnā" (X R 4 P);
d. "regulatora P05 pozīcijas maiņa - līmenis kolonnas kubā" (X R 5 L);
e) “regulējošās institūcijas pozīcijas maiņa P02 * - izejvielu temperatūra θ F pēc T-1" (X R 2* θ F);
un. “regulējošās institūcijas pozīcijas maiņa P04 * - spiediens P kolonnā" (X R 4* R);
h. “regulatora P06 stāvokļa maiņa - temperatūra kolonnas apakšā” (X R 6 θ TO);
z*. “regulējošā korpusa PO6 stāvokļa maiņa - temperatūra θ B kolonnas augšpusē” (X R 6 θ B);
Un. “regulējošā korpusa stāvokļa maiņa ROZ - temperatūra θ B kolonnas augšpusē" (X P3 θ B);
Un * . “regulējošās iestādes stāvokļa maiņa ROZ - temperatūraθ UZ kolonnas apakšā" (X R 3 θ UZ).
3. Norādīti uz objektu iedarbojošo traucējumu lielumi, izteikti % no regulējošās institūcijas gājiena:
a) kanāls X R 1 F(pamatojoties uz izejvielu patēriņu F);
b) kanāli X R 2 F 1 , X Р2 θ F(ar sildīšanas līdzekļa spiedienu P 1 un tā siltuma saturu q 1);
c) kanāls X R 3 XD(atbilstoši izejvielu sastāvam X F);
d) kanāls X P4 P(ar spiedienu R 2 aukstumaģents tiek piegādāts kondensatoram T-3);
d) kanāls X R 5 L(pēc siltuma satura q 2 apkures aģents piegādāts katlam T-2).
4. Noteiktas prasības regulēšanas procesa kvalitātei (dinamiskā kļūda X maks, regulēšanas laiks t P, pārejošu procesu vājinājuma pakāpe ψ , statiskās vadības kļūda X cm).
Sākotnējie dati uzdevuma 2. punktam (a - d), 3. un 4. punktam ir norādīti tabulā. 9, a 2. punktiem (f, g, h, i) - tabulā. 10 sākotnējie dati.
9.tabula Objekta dinamiskie parametri un kvalitātes prasības regulēšanas procesam
| Dinamiskie parametri | dimensiju | Iespējas | ||||||||||||
| ΔХ Р1 → ΔF ΔХ Р2 → Δθ F ΔХ Р2 → ΔG n ΔХ Р3 → ΔX D ΔХ Р4 → ΔP ΔХ Р5 → ΔL | T | Ar min Ar min min min | 8,0 6,2 6,0 4,8 3,6 3,6 | 8,4 6,5 7,0 5,0 4,0 4,0 | 9,0 6,6 6,5 4,6 3,8 2,8 | 5,9 8,5 4,5 3,0 4,5 | 9,4 5,8 12,0 4,9 4,2 4,2 | 9,6 6,8 10,0 8,0 4,5 3,0 | 10,4 6,3 7,1 4,7 3,0 3,7 | 8,2 6,1 6,4 4,4 3,5 4,8 | 9,8 5,9 7,2 5,1 4,3 5,0 | 12,0 5,5 8,0 5,0 2,7 3,4 | 10,5 5,4 8,4 4,7 3,1 4,6 | 11,6 5,3 8,8 5,2 4,4 4,4 |
| ΔХ Р1 → ΔF ΔХ Р2 → Δθ F ΔХ Р2 → ΔG n ΔХ Р3 → ΔX D ΔХ Р4 → ΔP ΔХ Р5 → ΔL | UZ OB | mērvienība.reg.ve.% insults r. O. | 3,9 0,40 0,80 0,01 0,01 16,0 | 4,0 0,48 0,60 0,012 0,10 32,0 | 3,8 0,44 0,70 0,011 0,07 20,0 | 3,9 0,40 0,80 0,01 0,08 30,0 | 4,2 0,43 0,85 0,012 0,07 30,0 | 4,1 0,50 0,82 0,01 0,10 50,0 | 4,3 0,58 0,80 0,012 0,08 27,0 | 3,9 0,42 0,78 0,014 0,047 23,4 | 4,4 0,50 0,81 0,01 0,05 29,2 | 4,1 0,47 0,78 0,011 0,05 18,0 | 3,7 0,60 0,83 0,014 0,08 24,0 | 4,05 0,48 0,80 0,012 0,075 35,0 |
| ΔХ Р1 → ΔF ΔХ Р2 → Δθ F ΔХ Р2 → ΔG n ΔХ Р3 → ΔX D ΔХ Р4 → ΔP ΔХ Р5 → ΔL | τ | Ar min Ar min min min | 2,0 4,6 1,5 2,9 1,9 1,8 | 2,1 4,8 2,0 3,0 1,8 2,2 | 2,3 4,9 1,8 2,8 1,5 1,3 | 2,5 4,3 2,3 2,7 1,8 2,4 | 2,4 4,2 3,0 2,9 1,9 2,6 | 2,5 5,0 2,5 3,1 2,0 1,2 | 2,6 4,7 2,0 2,8 2,7 1,6 | 2,1 4,5 1,9 2,6 2,1 2,5 | 2,5 4,4 2,1 3,0 2,0 2,7 | 3,2 4,1 2,2 3,1 1,9 2,0 | 2,6 4,0 2,1 2,8 2,5 2,8 | 3,0 3,9 2,2 3,0 2,0 2,3 |
| ΔХ Р1 → ΔF ΔХ Р2 → Δθ F ΔХ Р2 → ΔG n ΔХ Р3 → ΔX D ΔХ Р4 → ΔP ΔХ Р5 → ΔL | x B | % insults r. O. | ||||||||||||
| ΔХ Р1 → ΔF ΔХ Р2 → Δθ F ΔХ Р2 → ΔG n ΔХ Р3 → ΔX D ΔХ Р4 → ΔP ΔХ Р5 → ΔL | X maks | m 3 / h 0 C m 3 / h m.share kgf/cm2 mm | 5,0 8,0 0,05 0,8 | 6,0 6,0 0,06 0,7 | 5,5 7,0 0,055 0,6 | 6,0 7,8 0,05 0,75 | 5,6 8,2 0,06 0,5 | 5,2 7,9 0,05 0,9 | 6,1 8,3 0,06 1,0 | 5,4 8,0 0,07 0,85 | 5,3 8,1 0,05 0,50 | 5,7 8,4 0,055 0,80 | 6,2 7,9 0,07 0,94 | 6,0 7,6 0,06 0,65 |
| ΔХ Р1 → ΔF ΔХ Р2 → Δθ F ΔХ Р2 → ΔG n ΔХ Р3 → ΔX D ΔХ Р4 → ΔP ΔХ Р5 → ΔL | t P | Ar min Ar min min min | ||||||||||||
| ΔХ Р1 → ΔF ΔХ Р2 → Δθ F ΔХ Р2 → ΔG n ΔХ Р3 → ΔX D ΔХ Р4 → ΔP ΔХ Р5 → ΔL | Ψ | 0,75 | ||||||||||||
| ΔХ Р1 → ΔF ΔХ Р2 → Δθ F ΔХ Р2 → ΔG n ΔХ Р3 → ΔX D ΔХ Р4 → ΔP ΔХ Р5 → ΔL | x ar m | m 3 / h 0 C m 3 / h m.share kgf/cm2 mm | 3,8 | 2,6 | 3,0 | 2,9 | 3,2 | 3,4 | 3,1 | 2,9 | 4,2 | 2,8 | 4,0 | 3,6 |
10.tabula Objekta dinamiskie parametri un kvalitātes prasības regulēšanas procesam
| Objekts (vadības kanāls) | Dinamiskie parametri | Izmērs | Iespējas | |||||||||||
| ΔХ * Р2 → Δθ F ΔХ * Р4 → ΔP | T | min min | 3,4 1,6 | 2,8 1,4 | 2,6 1,9 | 3,2 1,8 | 2,4 1,3 | 2,7 1,5 | 3,1 1,2 | 3,3 1,8 | 2,2 2,0 | 2,8 1,0 | 2,9 1,6 | 2,0 2,1 |
| ΔХ * Р2 → Δθ F ΔХ * Р4 → ΔP ΔХ Р6 → Δθ K ΔХ Р6 → Δθ В ΔХ Р3 → Δθ В ΔХ Р3 → Δθ F | mērvienība.reg.ve.% insults r. O. | 0,58 0,15 | 0,60 0,10 | 0,64 0,075 | 0,80 0,08 | 0,86 0,09 | 0,75 0,15 | 0,82 0,14 | 0,76 0,10 | 0,94 0,08 | 0,76 0,10 | 0,90 0,16 | 0,80 0,10 | |
| K 11 K 12 K 22 K 21 | 0,70 0,50 0,80 0,40 | 0,80 0,60 0,90 0,50 | 0,80 0,40 0,70 0,50 | 0,80 0,60 0,90 0,70 | 0,90 0,80 0,70 0,60 | 0,80 0,50 0,80 0,60 | 0,90 0,80 0,90 0,70 | 0,90 0,80 0,80 0,70 | 0,90 0,40 0,80 0,75 | 0,70 0,50 0,60 0,40 | 0,85 0,55 0,70 0,50 | 0,85 0,70 0,90 0,65 | ||
| ΔХ * Р2 → Δθ F ΔХ * Р4 → ΔP | τ | min min | 1,5 0,38 | 1,4 0,33 | 1,2 0,44 | 1,7 0,40 | 1,4 0,30 | 1,3 0,35 | 1,5 0,27 | 1,6 0,41 | 1,0 0,46 | 1,3 0,25 | 1,5 0,40 | 1,0 0,50 |
Kontroles jautājumi
1. Kaskādes automatizētās vadības sistēmas procesu vadības shēmās. To uzbūves un darbības principi. Kaskādes automatizēto vadības sistēmu piemēri rūpniecībā un enerģētikā.
2. Kombinētās automatizētās vadības sistēmas procesu vadības shēmās. Uzbūves un darbības principi. Fiziskās iespējamības nosacījumi. Kombinēto automatizēto vadības sistēmu piemēri rūpniecībā un enerģētikā.
PRAKTIKUMS Nr.8 (2 stundas)