Lauku māju, vasarnīcu māju, siltumnīcu un dažādu saimniecības ēku celtniecībā arvien vairāk sāk izmantot autonomās elektroapgādes sistēmas. Saules paneļi nodrošina neatkarību no vispārējiem elektrotīkliem. Un pilsētās privātajā sektorā uz māju jumtiem bieži var redzēt mājas elektrostaciju saules paneļus.
Šie paneļi var būt ar mono- un polikristāliskā silīcija konstrukcijām, var būt būvēti uz akumulatoru bāzes, kas izgatavoti, izmantojot amorfo vai mikromorfo tehnoloģiju, un var izmantot pat saules baterijas, kas izgatavotas, izmantojot tehnoloģiju “Moth Eye”. Turklāt katra ēka ir uzbūvēta tā, lai saules paneļi tiktu uzstādīti vietā, kas saņem maksimālu saules gaismu.
Mūsdienu hēlija sistēmu efektivitāte vidēji nepārsniedz 18% - 20%. Labākie paraugi var sasniegt 25% efektivitāti. 2014. gadā UNSW Austrālijas progresīvās fotoelementu centra zinātnieki ziņoja, ka viņi ir sasnieguši saules bateriju efektivitāti 40%.
Jāsaprot, ka efektivitātes vērtību mēra, kad hēlija paneli taisnā leņķī apgaismo saule. Ja saules baterija ir pastāvīgi fiksēta, tad dienas laikā, saulei virzoties pa debesīm, akumulatora tiešās saules apgaismojuma periods būs salīdzinoši īss. Un tāpēc pat vismodernāko saules paneļu efektivitāte samazināsies.
Lai maksimāli samazinātu hēlija sistēmu efektivitātes samazināšanos, uz rotējošiem moduļiem jāuzstāda saules paneļi, kas ļaus akumulatorus visas dienas garumā orientēt pret sauli. Šādu rotējošu ierīci, uz kuras ir piestiprināta nesošā konstrukcija ar vienu vai vairākiem saules paneļiem, sauc par izsekotāju.
Tas ir paredzēts, lai uzraudzītu sauli un, atkarībā no tās stāvokļa, orientētu saules paneli pret to. Šī ierīce atkarībā no versijas ietver vienu vai divus saules izsekošanas sensorus, kā arī rotējošu mehānismu. Izsekotājs jāuzstāda labi apgaismotā vietā uz zemes, uz stacionāra statīva vai uz masta, kas pacels izsekotāju tādā augstumā, lai saules baterija vienmēr tiktu apgaismota saulē.
Izsekotājs ar četriem saules paneļiem uz masta
Pat visvienkāršākā rotējošā ierīce ar saules izsekošanas sistēmu ļauj iegūt maksimālu efektivitāti no gēla baterijām. Pētījumi liecina, ka, ja saules paneļi nav pareizi orientēti pret sauli, tiek zaudēti līdz 35% enerģijas. Tāpēc, lai sasniegtu plānoto jaudu stacionāra fotoelementu montāžas gadījumā, nepieciešams uzstādīt lielāku skaitu paneļu.
Saules paneļu rotācijas kontroles sistēmu uzbūves princips
Nozare ražo vairāku veidu saules paneļu rotācijas kontroles sistēmas. Tās ir diezgan dārgas (līdz 100 000 rubļu) ierīces, kas var kontrolēt vairāku hēlija paneļu stāvokli vienlaikus.
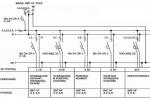
Tā kā saule dienas laikā pārvietojas ne tikai horizontāli, bet arī vertikāli, šīs vadības sistēmas uzrauga gan pozīcijas izmaiņas, gan saskaņā ar saņemto informāciju izdod komandas paneļa rotēšanai ap horizontālo vai vertikālo asīm. Vispārīgā gadījumā šāda vadības sistēma sastāv no saules sensora, signāla pārveidotāja (P) no šī sensora, signāla pastiprinātāja (U), mikrokontrollera (MC), dzinēja vadības ierīces (ECD), paša dzinēja un , visbeidzot, pats rāmis, uz kura tas ir uzstādīts.hēlija panelis.

Tracker vadības ķēde
Raksturīgi, ka rotācijas kontrolei abās asīs tiek izmantota viena un tā pati ķēde. Atšķiras tikai saules stāvokļa sensori un motori. Vienkāršākais saules stāvokļa sensors sastāv no divām fotodiodēm, kas atdalītas ar necaurspīdīgu starpsienu.
Atkarībā no tā, kādu kustību šis sensors uzrauga, starpsiena tiek uzstādīta horizontāli vai vertikāli, bet tai jābūt stingri vērstai pret sauli. Kamēr abas fotodiodes ir vienādi izgaismotas, no tām nākošie signāli ir vienādi. Tiklīdz saule kustas tik daudz, ka viena no fotodiodēm atrodas starpsienas ēnā, rodas signālu nelīdzsvarotība un vadības sistēma ģenerē atbilstošu komandu saules paneļa pagriešanai.

Saules stāvokļa sensora ķēde
Parasti kā pagrieziena galda motori tiek izmantoti pakāpju motori vai pretvārstu motori. Šādās vadības sistēmās izsekošanas sensori ir uzstādīti uz vienas un tās pašas platformas un griežas kopā ar to, tādējādi nodrošinot precīzu hēlija paneļa orientāciju pret sauli. Lai sensors darbotos droši, tas ir jāaizsargā no piesārņojuma, sniega uzkrāšanās un optikas ēnojuma ar nejaušiem objektiem.
Ir vadības sistēmas, kurās izsekošanas sensori tiek noņemti no atbalsta rotējošās platformas un atrodas vietā, kas ir aizsargāta no šādām ietekmēm. Šajā gadījumā signāls no sensoriem tiek nosūtīts uz sinhronizatora raidītāju. Orientējot izsekošanas sensoru pret sauli, sinhronais raidītājs pārraida vadības darbību uz sinhrono uztvērēju, kas rotē atbalsta platformu, vēršot to tieši pret sauli.
Saules paneļa rotācijas vadības sistēma, kuras pamatā ir pulksteņa mehānisms
Rūpnieciskās iekārtas - pilnībā aprīkotas hēlija spēkstacijas ar biaksiāliem rotējošiem moduļiem - ir diezgan dārgas. Piemēram, rūpnieciskais izsekotājs UST-AADAT maksā apmēram pusotru miljonu rubļu. Visu saules elektrostaciju īpašnieku dabiskā vēlme ir palielināt jaudu, vienlaikus samazinot izmaksas. Rezultātā parādījās paštaisītas ierīces, kuru dizains bija oriģināls, izmantojot metāllūžņus. Un šīs ierīces diezgan veiksmīgi kontrolē paneļu orientāciju pret sauli.
Viena no šādas ierīces iespējām ir hēlija paneļu orientācijas kontroles sistēma, kas veidota, pamatojoties uz pulksteņa mehānismu. Lai izsekotu saulei, nav obligāti jāizmanto gaismas uztveršanas ierīces. Lai to izdarītu, vienkārši paņemiet parasto mehānisko sienas pulksteni. Pat veci staiguļi derēs. Ir zināms, ka vienas stundas laikā saule pa debesīm no austrumiem uz rietumiem virzās pa ceļu, kas atbilst 15° leņķiskajam pārvietojumam. Tā kā hēlija panelim šāda leņķiskā nobīde nav īpaši kritiska, pietiek ar rotācijas mehānisma iedarbināšanu reizi stundā.

Saules kustības izsekošana pēc pulksteņa
Ierīce hēlija paneļa pagriešanai ap vertikālo asi var izskatīties šādi. Fiksēts kontakts tiek izveidots ciparnīcā minūtes rādītāja garuma attālumā no centra, vietā, kas atbilst pulksten 12. Kustīgais kontakts atrodas minūtes rādītāja galā.
Tādējādi ik pēc 60 minūtēm kontakti aizvērsies un motors ieslēgsies, pagriežot saules paneli. Dzinēju var izslēgt dažādos veidos, piemēram, izmantojot gala slēdzi vai laika releju. Ja uz ciparnīcas uzstādīsiet citu fiksēto kontaktu vietā, kas atbilst pulksten 6, tad paneļa pozīcija tiks koriģēta ik pēc pusstundas.
Šajā gadījumā dzinēja izslēgšanas ierīces ir jāiestata tā, lai tā pagrieztu nesēja platformu 7,5° leņķī.
Turklāt, ja vēlaties, šeit, uz šī mehānisma, ar citas kontaktu grupas palīdzību, bet pulksteņrādītāja virzienā, jūs varat salikt ķēdi saules paneļa automātiskai atgriešanai sākotnējā stāvoklī. Pamatojoties uz to pašu roku pulksteņrādītāja virzienā, varat salikt vadības sistēmu paneļa pagriešanai ap horizontālo asi. Kamēr stundu rādītājs virzās uz pulksten 12, atbalsta rāmis paceļas līdz ar sauli. Pēc 12 stundām horizontālās ass motors tiek apgriezts un saules panelis sāk griezties pretējā virzienā.
Ūdens pulksteņa princips saules paneļu rotācijas vadības sistēmā
Šo sistēmu izgudroja deviņpadsmit gadus vecais students Edens Fulls no Kanādas. Tas ir paredzēts vienas ass izsekotāja vadīšanai. Darbības princips ir šāds. Rotācija tiek veikta ap horizontālo asi. Saules panelis ir uzstādīts sākotnējā stāvoklī tā, lai saules stari būtu perpendikulāri paneļa plaknei.
Vienā paneļa pusē ir piekārts trauks ar ūdeni, pretējā pusē ir piekārta krava, kas ir līdzsvarā ar ar ūdeni piepildīto trauku. Tvertnes apakšā ir izveidots neliels caurums, lai ūdens pa pilienam izplūstu no šī trauka. Šī cauruma izmērs tiek izvēlēts eksperimentāli. Ūdenim izplūstot, trauks kļūst vieglāks, un pretsvars lēnām griež rāmi ar paneli.

Ūdens pulksteņa izsekotājs
Izsekotāja sagatavošana darbībai sastāv no ūdens ieliešanas tukšajā traukā un saules paneļa novietošanas sākotnējā stāvoklī.
Šie divi piemēri neizsmeļ iespējamās rotācijas moduļu konstruēšanas iespējas. Ar nelielu iztēli jūs varat iegūt vienkāršu, bet ļoti efektīvu ierīci, kas garantēti palielinās jūsu mājas hēlija spēkstacijas efektivitāti.
Kāds draugs nesen man lūdza uzbūvēt viņam "heliostatu", lai ar maziem motoriem orientētu saules paneli aiz saules. Ķēde paņemta no interneta, pārbaudīta oriģinālā plate, un tā darbojas. Bet es arī uzzīmēju savu iespiedshēmas plati, kompaktāku, kurā var ielikt rezistorus un kondensatorus planārā SMD veidā.
Tālāk ir sniegts autora ķēdes apraksts. Šī ierīce izmanto impulsu vadību un automātiski spēj orientēt saules paneli uz labāko apgaismojumu. Shēma sastāv no pulksteņa ģeneratora (DD1.1, DD1.2), divām integrējošām shēmām (VD1R2C2, VD2R3C3), tikpat daudz draiveru (DD1.3, DD1.4), digitālā komparatora (DD2), divām invertori (DD1. 5, DD1.6) un tranzistora slēdzis (VT1—VT6) elektromotora M1 griešanās virzienam, kas kontrolē platformas, uz kuras uzstādīta saules baterija, rotāciju.
Kad tiek piegādāta strāva (no paša saules paneļa vai no akumulatora), ģenerators, kura pamatā ir elementi DD1.1, DD1.2, sāk ģenerēt pulksteņa impulsus ar frekvenci aptuveni 300 Hz. Ierīcei darbojoties, tiek salīdzināti invertoru DD1.3, DD1.4 un integrējošo shēmu VD1R2C2, VD2R3C3 radīto impulsu ilgumi. To slīpums mainās atkarībā no integrācijas laika konstantes, kas savukārt ir atkarīga no fotodiožu VD1 un VD2 apgaismojuma (kondensatoru C2 un SZ uzlādes strāva ir proporcionāla to apgaismojumam).
Signāli no integrējošo shēmu izejām tiek piegādāti uz līmeņa draiveriem DD1.3, DD1.4 un pēc tam uz digitālo komparatoru, kas izgatavots uz DD2 mikroshēmas elementiem. Atkarībā no impulsu ilgumu attiecības, kas nonāk komparatora ieejās, elementa DD2.3 (kontakts 11) vai DD2.4 (kontakts 4) izejā parādās zema līmeņa signāls. Ar vienādu fotodiožu apgaismojumu augsta līmeņa signāli atrodas abās salīdzinājuma izejās.
Invertori DD1.5 un DD1.6 ir nepieciešami tranzistoru VT1 un VT2 vadīšanai. Augsts signāla līmenis pirmā invertora izejā atver tranzistoru VT1, otrā - VT2. Šo tranzistoru slodzes ir jaudīgu tranzistoru VT3, VT6 un VT4, VT5 slēdži, kas pārslēdz elektromotora M1 barošanas spriegumu. Shēmas R4C4R6 un R5C5R7 izlīdzina viļņus vadības tranzistoru VT1 HVT2 pamatnēs. Motora griešanās virziens mainās atkarībā no savienojuma ar barošanas avotu polaritātes. Digitālais komparators neļauj vienlaicīgi atvērties visiem galvenajiem tranzistoriem un tādējādi nodrošina augstu sistēmas uzticamību.
Saulei lecot, fotodiožu VD1 un VD2 apgaismojums būs atšķirīgs, un elektromotors sāks griezt saules bateriju no rietumiem uz austrumiem. Samazinoties formētāju ģenerēto impulsu ilguma starpībai, samazināsies iegūtā impulsa ilgums, pakāpeniski palēnināsies saules baterijas griešanās ātrums, kas nodrošinās tā precīzu pozicionēšanu. Tādējādi ar impulsa vadību elektromotora vārpstas rotāciju var pārnest uz platformu ar saules bateriju tieši, neizmantojot pārnesumkārbu.
Dienas laikā platforma ar saules bateriju griezīsies, sekojot saules kustībai. Iestājoties krēslai, impulsu ilgums digitālā komparatora ieejā būs vienāds, un sistēma pāries gaidīšanas režīmā. Šajā stāvoklī ierīces patērētā strāva nepārsniedz 1,2 mA (orientācijas režīmā tas ir atkarīgs no motora jaudas).
Heliostata akumulators tiek izmantots, lai uzglabātu saules paneļa radīto enerģiju un darbinātu pašu elektronisko bloku. Tā kā elektromotors tiek ieslēgts tikai, lai pagrieztu akumulatoru (īsu laiku), nav strāvas slēdža. Šī diagramma orientē saules bateriju horizontālā plaknē. Tomēr, novietojot to, jāņem vērā apgabala ģeogrāfiskais platums un gada laiks. Ja konstrukciju papildināsit ar vertikālās novirzes bloku, kas samontēts pēc līdzīgas shēmas, jūs varat pilnībā automatizēt akumulatora orientāciju abās plaknēs.
Lai aizsargātu fotodiodes no pārmērīgas apstarošanas, tiek izmantots zaļās gaismas filtrs. Starp fotosensoriem ir novietots necaurspīdīgs aizkars. Tas ir piestiprināts perpendikulāri dēlim tā, ka, mainoties apgaismojuma leņķim, tas noēno vienu no fotodiodēm. Vairāk lasiet rakstā pievienotajā arhīvā. Iespiedshēmas plates vispārīgs skats:

Pēc salikšanas pārbaudīju ierīces darbību - viss darbojas kā nākas, kad iedegas viena un otra LED, motors darbojas pulksteņrādītāja virzienā un pretēji pulksteņrādītāja virzienam.

Radiators ir nedaudz liels, nav obligāti jābūt tik lielam, bet draugam patika, tad viņš teica, ka pārgriezīs uz divām pusēm diviem gataviem dēļiem, pagaidām testē, jo vēl nav izlēmis. motoru jauda.

Šie radiatori visi ir izņemti no barošanas blokiem, man ir sakrājies daudz, un cilvēki visu nes un nes. Attīstība - I. Tsaplins. Ķēdes montāža un pārbaude - Igorāns.
Apspriediet rakstu SAULES PANEĻA ROTĒJOŠAIS KONTROLIERIS
Radioastronomijas, saules enerģijas, kosmosa sakaru, Zemes un citu planētu virsmas izpētes attīstības perspektīvas ir tieši saistītas ar iespēju kosmosā palaist liela izmēra struktūras. Pašlaik Krievijā un ārzemēs tiek veikti pētījumi, kuru mērķis ir izveidot kosmosā dažādu klašu struktūras ar lieliem izmēriem: kosmosa teleskopus un antenas, enerģētikas un zinātnes platformas, liela izmēra saules paneļus (SB) utt.
Viena no nozīmīgām un strauji attīstošām jomām liela izmēra kosmosa konstrukciju izveides jomā ir nolaižamo saules paneļu, kā arī uz kosmosa kuģiem (SC) uzstādīto antenu izstrāde dažādiem mērķiem.
Palielinoties kosmosa kuģu izmēram un sarežģītībai, prasība novietot kosmosa kuģi zem nesējraķešu apvalka kļūst par nopietnu konstrukcijas ierobežojumu. Tas noveda pie kosmosa kuģu izveides ar dažādu konfigurāciju transportēšanas laikā un darbības stāvoklī orbītā. Kosmosa kuģī ietilpst dažādu antenu transformējamas konstrukcijas, salokāmi stieņi ar uz tiem uzstādītiem instrumentiem un sensoriem, drošības paneļi un citi, kas atveras kosmosā un iegūst funkcionēšanai orbītā nepieciešamo formu. Tādējādi mūsdienu kosmosa kuģi ir ķermeņu kopums, kas noteiktā veidā savienoti viens ar otru. Parasti kosmosa kuģim ir galvenais masīvs bloks, kuram ir piestiprinātas transformējamas konstrukcijas (B1. att.).
1 - saules baterija; 2 - saules orientācijas sensors; 3 - daudzvirzienu S-joslas antena; 4 - C-joslas antena (diametrs 1,46 m); 5 - daudzkanālu antena (fāzu bloka antenas emitētājs); 6 - vadāma antena (K-S-joslas vienreizēja piekļuve, K-josla sakaru savienojumam starp kosmosu) (diametrs 4,88 m); 7 - orbītas ātruma vektora virziens; 8 - virziens uz Zemi; 9 - 30 elementu S-joslas fāzēta bloka antena (daudzkanālu sakaru līnija); 10 - vadāma K-joslas antena (kosmosa-Zemes sakaru līnija) (diametrs 1,98 m); 11 — K-joslas antena (diametrs 1,13 m)
Tāpēc, lai moderns kosmosa kuģis ietilptu zem nesējraķetes korpusa, visas transformējamās konstrukcijas noteiktā veidā ir jāievieto kompaktā transportēšanas pozīcijā. Pēc tam, kad kosmosa kuģis ir palaists noteiktā orbītā, visas transformējamās struktūras tiek izvietotas saskaņā ar doto programmu. Vispārīgā gadījumā transformējamo konstrukciju nogādāšanas darba stāvoklī posmu skaits var būt diezgan liels (B2. att.).

1 - elementu sākotnējā konfigurācija pirms izvietošanas; 2 - saules paneļu atvienošana un izvietošana; 3 - saules bateriju stieņu fiksācija; 4 - kosmosa-Zeme sakaru līnijas antenas izvietošana; 5 - C-joslas antenas izvietošana; 6 - interorbitālā velkoņa IDS nodalījums; 7 - vienas piekļuves antenu stieņu izvietošana un antenu pagriešana; 8 - galīgā konfigurācija pēc visu elementu izvietošanas
Pārveidojamo konstrukciju elementu kustības laikā tie tiek fiksēti noteiktā stāvoklī, savukārt kustība tiek veikta gan ar elektrisko piedziņu palīdzību, gan dažāda veida atsperu deformācijas enerģijas dēļ.
Tādējādi problēma izveidot uzstādītas sistēmas īpašiem funkcionāliem mērķiem, kuru izmēri pārsniedz kosmosa kuģa izmērus, ir saistīta ar salokāmu konstrukciju izstrādi, kas atbilst tādām pretrunīgām prasībām kā minimālais svars un tilpums salocītā transportēšanas stāvoklī, augsta izvietošanas uzticamība no transportēšanas stāvoklis darba stāvoklī un darbība orbītā, maksimālais darba virsmas laukums atvērtā stāvoklī, stabilas darbības īpašības slodzes apstākļos. Šādu konstrukciju veiktspēju galvenokārt nosaka tas, cik spēcīgi atvēršanas laikā tajās rodas spēki, tāpēc to drošas atvēršanas nodrošināšana ir saistīta ar sarežģītu mehānisku problēmu risināšanu.
Neskatoties uz ievērojamiem sasniegumiem šādu konstrukciju projektēšanā, joprojām svarīgs uzdevums ir nodrošināt lielu konstrukciju vienmērīgu un drošu atvēršanu, vienlaikus nodrošinot to turpmāko darbību.
Pašreizējās tendences kosmosa tehnoloģiju attīstībā nosaka nepieciešamību izveidot kosmosa kuģus ar lielu jaudu un pagarinātu kalpošanas laiku - 15 un vairāk gadus. Kosmosa kuģa barošanas avota palielināšana nozīmē SB spārna lietderīgās platības palielināšanos (att. B3).

Tajā pašā laikā tie jānovieto orbītā esošo kosmosa kuģu nesējraķešu derīgās kravas zonā. Šādos apstākļos ir acīmredzama tikai viena izeja - uzbūvēt SB spārnu, palielinot paneļu skaitu, kas kosmosa kuģa nosūtīšanas orbītā posmā tiek salocītas racionālā iepakojumā. Uz zemes veiktos eksperimentos nav iespējams pietiekami reproducēt SB izvietošanas procesa faktiskos apstākļus un tādējādi pilnībā apstiprināt izvietošanas sistēmas uzticamību un veiktspēju. Drošības sistēmas informācijas atklāšanas sistēmas atteice vai nenormāla darbība gandrīz vienmēr izraisa ārkārtas situācijas. Matemātiskās modelēšanas metožu izmantošana būtiski nosaka kvalitāti, samazina saliekamo daudzsaišu SB izstrādes laiku un izmaksas. Tas nodrošina iespēju sniegt detalizētu informācijas atbalstu visā SB izstrādes, ražošanas, eksperimentālās testēšanas un darbības periodā, ieskaitot uzticamības analīzi, kļūmju un avārijas situāciju prognozēšanu.
Izgudrojums attiecas uz kosmosa kuģu (SC) barošanu, izmantojot saules paneļus (SB), nodrošinot lietderīgu jaudu gan no darba, gan aizmugures virsmas. Piedāvātā sistēma satur ierīci saules paneļa pagriešanai, pastiprināšanas-pārveidošanas ierīci, vadības bloku saules paneļa orientācijai pret Sauli, bloku saules paneļa pagriešanai noteiktā pozīcijā, strāvas regulatoru bloku, strāvas sensors un barošanas sistēmas vadības bloks. Sistēmā papildus ir iekļauti mērījumu bloki: kosmosa kuģa orbītas augstums, kosmosa kuģa orientācija un Saules pacēluma leņķis virs Zemes horizonta, kas redzams no kosmosa kuģa. Ir bloks saules sistēmas radītās maksimālās strāvas vērtības iestatīšanai tiešā saules starojuma ietekmē. Ir ieviesti arī bloki, lai noteiktu: brīžus, kad no Zemes atstarotais starojums skar saules paneļa darba virsmu, brīžus, kad no Zemes atstarotais starojums skar saules paneļa aizmugurējo virsmu, brīžus, kad tiek ģenerēta papildu elektrība saules panelis no Zemes atstarotā starojuma ietekmē, saules paneļa griešanās leņķis un saules starojuma apgaismotās darba virsmas daļas laukums SB. Ķēdē ietilpst arī divas atslēgas un elementi NOT un OR. Izgudrojuma tehniskais rezultāts ir palielināt saules enerģijas izvadi, pilnīgāk izmantojot saules starojumu, kas atstaro no Zemes un nonāk saules enerģijas darba un aizmugurējās virsmās, ņemot vērā iespējamo saules enerģijas virsmas ēnojumu ar kosmosa kuģu konstrukcijas elementiem. . 8 slim.
RF patenta 2341421 rasējumi







Izgudrojums attiecas uz kosmosa tehnoloģiju jomu, proti, uz kosmosa kuģu (SC) barošanas sistēmām (SES), un to var izmantot, lai kontrolētu to saules paneļu (SB) pozīciju.
Lai nodrošinātu augstu Saules sistēmas efektivitāti, lielākā daļa kosmosa kuģu ir aprīkoti ar sistēmu to automātiskai orientācijai uz Sauli (sk., 190.-194. lpp.; , 57. lpp.). Šādas sistēmas sastāvs, kas ņemts kā analogs, ietver saules sensorus, loģiskās pārveidošanas ierīces un elektriskās piedziņas, kas kontrolē Saules sistēmas stāvokli. Sistēmai darbojoties, saules paneļu paneļi ir orientēti tā, lai leņķis starp normālu pret to apgaismoto darba virsmu un virzienu uz Sauli būtu minimālais lielums, kas nodrošina maksimālo elektroenerģijas plūsmu no saules paneļa.
Šīs kosmosa kuģa SB pozīcijas kontroles sistēmas trūkums ir tāds, ka tā neparedz SB izvietošanas darbības fiksētās konstrukcijas pozīcijās, piemēram, lai aizsargātu pret vides faktoru (EFF) negatīvo ietekmi. FWS var būt lielas enerģijas saules starojuma daļiņu plūsmas vai gāzu plūsmas, kas rodas no kosmosa kuģu orientācijas dzinējiem.
Tuvākais analogs, kas pieņemts kā prototips, ir SB kosmosa kuģa pozīcijas kontroles sistēma, kas aprakstīta 6. lpp.
Sistēmas blokshēmā ir saules panelis, uz kura korpusa cietā pamatnes atrodas fotoelementu bateriju bloks (PVB), saules paneļa rotācijas ierīce (UPSB); pastiprināšanas-pārveidošanas ierīce (ACD); vadības bloks SB orientācijai pret sauli (BUOSBS); bloks SB pagriešanai noteiktā pozīcijā (BRSBZP); strāvas regulatora bloks (BRT), AB bloks (BAB); lādētājs akumulatoram (ZRU AB); bloks komandu ģenerēšanai akumulatora uzlādēšanai (BFKZ AB); slodzes strāvas sensors (LCS); elektroapgādes sistēmas vadības bloks (BUZES); barošanas kopne (SE). Šajā gadījumā GSE izeja ir savienota ar BRT ieeju. BRT izeja ir savienota ar SE. BAB ir savienots ar ShE, izmantojot tā ieeju caur AB slēgto sadales iekārtu. AB sadales iekārta ar tās pirmo ieeju ir savienota ar ShE, bet DTN izeja ir savienota ar AB sadales iekārtas otro ieeju, kuras ieeja savukārt ir savienota ar ShE. BAB ar savu izeju ir savienots ar BFKZ AB pirmo ieeju, un pirmā BUSES izeja ir pievienota norādītā bloka otrajai ieejai. BFKZ AB izeja ir savienota ar ZRU AB trešo ieeju. BUSES otrā un trešā izeja ir attiecīgi savienota ar BUSBS un BRSBZP pirmajām ieejām. UPSB izeja ir savienota ar otrajām ieejām BUOSBS un BRSBZP. BUOSBS un BRSBZP izejas ir savienotas attiecīgi ar UPU pirmo un otro ieeju, kuru izeja savukārt ir savienota ar UPSB ieeju. Turklāt UPSB ir mehāniski savienots ar SB.
Šīs sistēmas īstenoto darbību būtība ir šāda. Lai maksimāli palielinātu elektrības plūsmu no SB, SB paneļi tiek pagriezti darba pozīcijā, kas atbilst normālu izlīdzināšanai ar to apgaismoto darba virsmu ar plakni, ko veido SB paneļu griešanās ass un virziens uz Sauli. . Tālāk tiek noteikts PVD negatīvās ietekmes sākuma brīdis uz SB darba virsmu un SB paneļi tiek pagriezti noteiktā leņķī starp normālu pret to apgaismoto darba virsmu un virzienu uz Sauli līdz plkst. šo faktoru ietekmes sākuma laiks un SB paneļi tiek atgriezti darba stāvoklī pēc noteiktā trieciena beigām.
GSE saražotā elektroenerģija tiek nodota no SB uz BRT. Pēc tam elektrība no BRT tiek piegādāta ShE SES. Orbītas ēnas daļā (ja nav strāvas no Saules sistēmas) akumulatora sadales iekārta akumulatora bloka izlādes dēļ kompensē elektroenerģijas trūkumu uz kosmosa kuģa. Līdz ar to AB ZRU iekasē maksu no BAB, izmantojot BFKZ AB. Tajā pašā laikā informācija no DTN tiek izmantota, lai akumulatora sadales iekārtā veiktu uzlādes-izlādes ciklus.
Vienlaikus ar darbību kosmosa kuģa barošanas režīmā sistēma atrisina saules paneļu paneļu plakņu novietojuma kontroles problēmu. Atkarībā no kosmosa kuģa lidojuma programmas, kas tiek izpildīta, SB vadībai prioritāte tiek piešķirta vienam no BUOSBS vai BRSBZP blokiem.
Pēc komandas BUSES BUSBS bloks kontrolē Saules sistēmas orientāciju uz Sauli. Saules kontroles algoritma ievades informācija ir: vienības virziena vektora pozīcija uz Saules attiecībā pret koordinātu asīm, kas saistītas ar kosmosa kuģi; SB pozīcija attiecībā pret kosmosa kuģa korpusu, kas iegūta pašreizējo izmērīto leņķa vērtību veidā starp parastās pozīcijas pašreizējo stāvokli pret SB darba virsmu un virzienu uz Sauli no leņķa sensoriem (AS) instalēta UPSB. Kad SB ir orientēts uz Sauli, 0. Vadības algoritma izejas informācija ir komandas pagriezt SB attiecībā pret UPSB izejas vārpstas asi un komandas apturēt rotāciju. UPSB tālvadības pultis nodrošina atsevišķus signālus par drošības sistēmas pozīciju. Diskrētais izmērs nosaka satelīta orientācijas precizitāti.
BRSBZP kontrolē SB ar BUSES palīdzību atbilstoši programmas iestatījumiem. SB vadības algoritms, kas balstīts uz programmatūras iestatījumiem, ļauj uzstādīt akumulatoru jebkurā vajadzīgajā pozīcijā, ko nosaka nepieciešamā leņķa vērtība = 2. Tajā pašā laikā, lai kontrolētu griešanās leņķi BRSBZP, tiek izmantota arī informācija no UPSB tālvadības pults.
UPU spēlē interfeisa lomu starp BUOSBS, BRSBZP un UPSB.
Ir zināms (sk., 272. lpp.), ka Saules starojums, kas nonāk uz Zemes, tiek atstarots no tās virsmas, no mākoņiem un izkliedēts atmosfērā. Saules baterija uztver atstarotā starojuma enerģiju, kas koncentrēta saules baterijas jutīguma apgabala spektrālajā diapazonā, un palielina tā izejas jaudu.
Tādējādi kosmosa kuģa orbītas apgaismotajā daļā SB papildus tiešajam saules starojumam saņem no Zemes atstaroto starojumu. Par prototipu pieņemtajai metodei un sistēmai ir būtisks trūkums - tās neļauj palielināt elektroenerģijas plūsmu, papildus izmantojot no Zemes atstarotā saules starojuma.
Piedāvātās sistēmas uzdevums ir palielināt elektroenerģijas plūsmu no saules paneļa, papildus izmantojot saules starojumu, kas atstaro no Zemes, nonākot saules paneļu darba un aizmugurējās virsmās, ņemot vērā iespējamo virsmas ēnojumu. kosmosa kuģa dizaina elementi.
Tehniskais rezultāts tiek sasniegts ar to, ka kosmosa kuģa saules paneļu stāvokļa kontroles sistēma, ieskaitot saules bateriju ar pozitīvu aizmugurējās virsmas izejas jaudu, ar uzstādītu fotoelektrisko bateriju bloku, ierīci saules paneļi, pastiprināšanas-pārveidošanas ierīce, vadības bloks saules paneļu orientācijai atbilstoši virzienam uz Sauli, bloks saules paneļu pagriešanai noteiktā pozīcijā, strāvas regulatoru bloks, strāvas sensors, vadības bloks barošanas sistēmai, savukārt fotoelementu bateriju bloka izeja ir savienota ar strāvas regulatora bloka ieeju, kura izeja ir savienota ar strāvas sensora ieeju, bet orientācijas vadības bloku izejas saules paneļi Saules virziens un saules paneļu pagriešana noteiktā pozīcijā ir savienoti attiecīgi ar pastiprināšanas-pārveidošanas ierīces pirmo un otro ieeju, kuras izeja ir savienota ar saules paneļu pagriešanas ierīces ieeju, kura izeja ir savienota ar vadības bloku ieejām saules paneļu orientēšanai Saules virzienā un saules paneļu pagriešanai noteiktā pozīcijā, un saules paneļu pagriešanas ierīce ir mehāniski savienota ar saules bateriju. akumulators; papildu bloks kosmosa kuģa orbītas augstuma mērīšanai, bloks kosmosa kuģa orientācijas mērīšanai, bloks Saules pacēluma leņķa mērīšanai virs Zemes horizonta, kas redzams no kosmosa kuģa, uzdevuma bloks maksimālās vērtības no saules paneļu radītās strāvas tiešā saules starojuma ietekmē, bloks no Zemes atstarotā starojuma momentu noteikšanai, atsitoties pret saules paneļu darba virsmu, bloks no Zemes atstarotā starojuma momentu noteikšanai, atsitoties pret muguru. saules paneļu virsma, bloks papildu elektroenerģijas ražošanas momentu noteikšanai ar saules baterijām no Zemes atstarotā starojuma ietekmē, bloks saules paneļu griešanās leņķa noteikšanai, bloks saules paneļu laukuma noteikšanai. saules paneļu darba virsmas daļa, ko apgaismo saules starojums, divi slēdži un elementi NOT un OR, savukārt strāvas sensora izeja ir savienota ar bloka pirmajām ieejām saules paneļu griešanās leņķa noteikšanai un bloka noteikšanai. papildu elektroenerģijas ģenerēšanas momenti ar saules baterijām no Zemes atstarotā starojuma ietekmē, kuru izeja un otrā līdz ceturtā ieeja ir savienota attiecīgi ar NOT elementa ieeju un iestatīšanas bloka izejām. saules bateriju radītās strāvas maksimālā vērtība tiešā saules starojuma ietekmē, OR elements un saules paneļu darba virsmas daļas noteikšanas bloka laukums, ko apgaismo saules starojums, pirmā un otrā ieeja un kuru izeja ir pieslēgta attiecīgi arī kosmosa kuģa orientācijas mērvienības, saules paneļu rotācijas ierīces un saules paneļu rotācijas leņķa noteikšanas vienības otrajai ieejai, kuras izeja un trešā līdz astotā ieeja ir savienota, attiecīgi uz bloka otro ieeju saules paneļu pagriešanai noteiktā pozīcijā un saules paneļu pagriešanas ierīces izejām, bloku saules paneļu radītās strāvas maksimālās vērtības iestatīšanai tiešā saules starojuma ietekmē, bloks kosmosa kuģa orbītas augstuma mērīšanai, bloki no Zemes atstarotā starojuma momentu noteikšanai darba un saules paneļu aizmugurējā virsmā un vienība Saules pacēluma leņķa mērīšanai virs redzamā Zemes horizonta no kosmosa kuģa, kura izeja ir savienota arī ar bloku pirmajām ieejām, lai noteiktu no Zemes atstarotā starojuma momentus, kas saskaras ar saules paneļu darba un aizmugurējām virsmām, kuru otrās ieejas ir savienotas ar bloka izeju. kosmosa kuģa orbītas augstuma mērīšanai, savukārt bloku izejas no Zemes atstarotā starojuma momentu noteikšanai, kas skar saules paneļu darba un aizmugurējās virsmas, arī ir pieslēgtas attiecīgi pie dažādām OR elementa ieejām, un elektroapgādes sistēmas vadības bloka izeja ir savienota ar pirmā un otrā taustiņa informācijas ieejām , kuru vadības ieejas ir savienotas ar elementa NOT izejām un bloku papildu elektroenerģijas ģenerēšanas momentu noteikšanai ar saules enerģiju . paneļi, kas atrodas attiecīgi no Zemes atstarotā starojuma ietekmē, un pirmā un otrā taustiņa izejas ir savienotas attiecīgi ar bloka otro ieeju, lai kontrolētu saules paneļu orientāciju pret Sauli un devīto ieeju. bloks, kas nosaka saules paneļu griešanās leņķi.
Piedāvātais izgudrojums attiecas uz tādu kosmosa kuģu klasi, kuru saules paneļus var aizēnot ar kosmosa kuģu konstrukcijas elementiem, kā arī kuru saules paneļiem ir pozitīva izejas jauda, ja tos apgaismo no saules paneļu aizmugures virsmas.
Piedāvātais tehniskais risinājums nodrošina SB, kam ir pozitīva SB paneļu aizmugurējās virsmas izejas jauda, ģenerētās strāvas palielinājums, jo papildus tiek izmantots no Zemes atstarots saules starojums, kas krīt uz SB paneļu darba un aizmugurējām virsmām. SB paneļi. Lai to izdarītu, kosmosa kuģim atrodoties izgaismotajā orbītas daļā, saules paneļa darba virsmas normāls ir vērsts pret Sauli un tiek noteikti laika intervāli, kad no Zemes atstarotais saules starojums nonāk vai nu uz darba virsmas. vai saules paneļu aizmugurējā virsmā. Pēc tam saules panelis tiek pagriezts tā, lai nodrošinātu maksimālu elektroenerģijas ražošanu no saules paneļa kopējā apgaismojuma ar tiešo saules starojumu, kas nonāk uz saules paneļu darba virsmas, un starojumam, kas atstarojas no Zemes, nonākot uz darba vai saules paneļu aizmugurējā virsma.
Piedāvātā izgudrojuma būtība ir ilustrēta 1.-8.att., kuros parādīts: 1. un 2.att. - apgaismojuma diagrammas saules paneļiem ar tiešu un atstarotu Saules starojumu no Zemes gadījumiem, kad pienāk no Zemes atstarotais starojums, attiecīgi uz saules paneļu darba un aizmugurējām virsmām; 3. un 4. attēlā parādītas SB apgaismojuma shēmas piedāvātajā sistēmā; 5. att. ir ģeometriskās konstrukcijas diagramma, kas izskaidro zemāk ievadītā leņķa definīciju; 6. att. ir ģeometriskās konstrukcijas diagramma, kas izskaidro SB darba virsmas apgaismotā laukuma noteikšanu, ņemot vērā SB ēnojumu; 7. attēlā ir piedāvātās sistēmas blokshēma; 8. att. ir grafiks, kurā parādīta elektroenerģijas ienākšana no starptautiskās kosmosa stacijas (SKS) Krievijas segmenta (PC) SB.
Paskaidrosim piedāvātās sistēmas īstenotās darbības.
1.-4.att., kas izskaidro aprakstītās Saules sistēmas apgaismojuma shēmas, visas konstrukcijas ir veidotas plaknē, ko veido kosmosa kuģa rādiusa vektors un virziens uz Sauli, un tiek ieviesti šādi simboli:
N - normāli pret SB paneļu darba virsmu;
S, PC, BC * - virziena vektori uz Sauli;
O - Zemes centrs;
VAI - kosmosa kuģa rādiusa vektors;
OB - Zemes rādiuss;
B ir punkts, no kura atstarotā starojuma plūsma nonāk kosmosa kuģī;
Leņķis starp virzieniem no kosmosa kuģa uz Sauli un punktu B;
MM * - horizonta līnija punktā B;
S un ir saules starojuma, kas nonāk kosmosa kuģī, krišanas leņķis un atstarošanas leņķis no Zemes;
PD - virziens no kosmosa kuģa uz Zemes horizontu;
B * - saskares punkts ar Zemi pa līniju PD;
g ir Saules pacēluma leņķis virs Zemes horizonta, kas redzams no kosmosa kuģa;
Q z ir Zemes diska pusleņķis, kas redzams no kosmosa kuģa;
Leņķis starp virzieniem RO un RV;
Q sb ir SB paneļu darba virsmas jutīguma zonas pusleņķis, mērot no parastā N (norādīts tikai 1. un 3. att.);
Leņķis starp N un S (norādīts tikai 3. un 4. zīm.);
2. un 4. attēlā papildus norādīts:
N O - normāli SB paneļu aizmugurējai virsmai;
S O - pretsaules virziens;
Leņķis starp virzienu N o un virzienu no kosmosa kuģa uz punktu B;
Q O - SB paneļu aizmugures virsmas jutīguma zonas pusleņķis, mērot no parastā N o .
Mēs ņemam vērā SB pašreizējo orientāciju, pie kuras normāls pret SB N darba virsmu tiek apvienots ar virzienu uz Sauli S (tajā pašā laikā N o tiek apvienots ar S o).
Mēs izmantojam katras aplūkojamās saules paneļu virsmas jutīguma zonu koncepciju - zonas, ko nosaka saules paneļu elementu konstrukcijas īpatnības, kuras apgaismotas no kuras puses saules panelis spēj ģenerēt elektrisko strāvu. Mēs iestatām katras saules paneļu virsmas jutības zonu pēc zonas pusleņķa vērtības, mērot no saules paneļa normālās virsmas līdz apskatāmajai virsmai:
Q sb - SB paneļu darba virsmas jutīguma zonas pusleņķis, Q sb<90°,
Q o - SB paneļu aizmugurējās virsmas jutīguma zonas pusleņķis, Q o<90°.
Apgaismojot Saules sistēmu ārpus šīm zonām, ģenerētās strāvas nav vai tā ir niecīgi maza.
No Zemes atstarotā starojuma nonākšana kosmosa kuģī iespējama tikai izgaismotajā orbītas daļā, savukārt atstarošanas punkta (punkta B) atrašanās vietu nosaka krišanas leņķu s un saules starojuma atstarošanas attiecība. no Zemes (sk., 39.-52. lpp.;).
Pēc tam, kad kosmosa kuģis iziet no Zemes ēnas, nonākot apgaismotajā orbītas daļā un pirms kosmosa kuģis nonāk Zemes ēnā, no Zemes atstarotais starojums skar saules paneļu darba virsmu (A gadījums, parādīts 1. att.).
Šo orbītas posmu nosaka nosacījumi:
Ņemot vērā SB jutīguma zonas koncepciju, no Zemes atstaroto starojumu SB paneļu darba virsma izmanto elektroenerģijas ražošanai, ja ir izpildīti šādi nosacījumi:
tad no Zemes atstarotais starojums skar Saules sistēmas darba virsmu un arī tā izmantošana elektroenerģijas ražošanai tiek veikta pie nosacījuma
Kosmosa kuģim atrodoties orbītas apgaismotā posma vidusdaļā, no Zemes atstarotais starojums ietekmē saules paneļu aizmugurējo virsmu (B gadījums, parādīts 2. att.). Šo orbītas posmu nosaka nosacījumi:
Ņemot vērā SB jutīguma zonas koncepciju, no Zemes atstaroto starojumu SB paneļu aizmugurējā virsma izmanto elektroenerģijas ražošanai, ja ir izpildīti šādi nosacījumi:
Lai noteiktu leņķi, varat izmantot dažādas metodes.
No leņķu summu vienādības, kas veido leņķi ORS, izriet:
Gadījumā A leņķu g un vērtības ir tuvas, un var izmantot formulu:
Gadījumā B leņķis ir mazs, un leņķu un (Q z + g) vērtības ir tuvas, tāpēc varat izmantot formulu:
Zemes diska pusleņķis, kas redzams no kosmosa kuģa Q z, tiek noteikts no trīsstūra ORV *:
kur norādīts: R e - Zemes rādiuss, H o - kosmosa kuģa orbītas augstums.
Leņķa noteikšanai var izmantot arī sarežģītāku metodi, kuras viena no iespējamajām iespējām ir šāda skaitļošanas procedūra.
5. attēlā, kas izskaidro leņķa definīciju, papildus norādīts:
K ir taisnleņķa trijstūra ORK taisnā leņķa virsotne.
Leņķi nosaka no taisnleņķa trijstūriem ORK un OVK:
Aizvietojot izteiksmes (14), (18) ar (11) un izsakot , iegūstam sakarību precīzai leņķa noteikšanai:
Leņķis ir saistīts ar leņķiem , s ar attiecību, kas iegūta no leņķu vienādības paralēlo taisnju PC un BC * secantā PB:
Gadījumā, ja atstarošanas virsmas raksturs ļauj pieņemt krišanas un atstarošanas leņķu vienādību:
Vērtību atbilstošo vienādojumu (23) atrod iterācijas ceļā, izmantojot šādu procedūru.
Mēs apzīmējam šī vienādojuma risinājumu attiecībā pret o un apzīmējam funkciju (23) labajā pusē kā:
Pirmajā iterācijā mēs aizstājam funkcijā (24) vērtību, kas vienāda ar 1 - kādu sākotnējo tuvinājumu vēlamajai vērtībai o. Gadījumā A kā sākotnējo tuvinājumu ir ērti ņemt leņķa g vērtību, B gadījumā – summas vērtību (Q z +g).
Veicam secīgi soļiem i=1, 2, 3,... iteratīvu procesu, kura katrā i-tajā solī atrodam i+1 - jaunu tuvinājumu vēlamajai vērtībai o - pēc formulas
ņemot vērā leņķa definīcijas apgabalus: (2) - gadījumā A un (7) - gadījumā B. Turklāt katrs jauns tuvinājums būs tuvāks vēlamajai vērtībai o nekā iepriekšējais.
Iteratīvo procesu pārtraucam, ja starpība starp iegūto jauno tuvinājumu i+1 un iepriekšējo tuvinājumu i ir mazāka par nepieciešamo aprēķinu precizitāti (vajadzīgā vērtības o aprēķina precizitāte):
jo turpmāk katrs jauns tuvinājums atšķirsies no iepriekšējā tuvinājuma par summu, kas mazāka par . Šajā gadījumā vēlamā vērtība o, uz kuru saplūst secīgo tuvinājumu secība i+1, i=1, 2, 3,..., arī atšķiras no pēdējā iegūtā tuvinājuma ne vairāk kā par . Tādējādi, ņemot vērā nepieciešamo aprēķinu precizitāti, tiek iegūta vēlamā o vērtība:
Šis iteratīvais process ātri vien tuvojas vēlamajam risinājumam - piemēram, ISS PC SB orientācijas kontroles gadījumā, kas aprakstīts tālāk kā šī tehniskā piedāvājuma pielietojuma ilustrācija, tiek sasniegta vēlamā vērtība ar precizitāti 1°. jau iteratīvā procesa 4. solī.
Ja nav saules starojuma, kas atspīd no Zemes, kas skar SB, strāva I, ko rada SB, tiks noteikta ar izteiksmi (sk. 109. lpp.):
kur I ir SB ģenerētā strāva;
I s_max ir strāva, ko ģenerē saules panelis, kad saules paneļu apgaismotā darba virsma ir orientēta perpendikulāri saules stariem, ja nav starojuma, kas atstarojas no Zemes, kas skar saules paneļu virsmu, un ja nav saules paneļu ēnojuma. saules paneļa darba virsmu ar kosmosa kuģa dizaina elementiem.
Mēs pieņemam, ka SB ģenerētā strāva ir proporcionāla SB paneļu virsmas laukumam, uz kuriem krīt starojums, kas ietekmē SB saules baterijas. Apzīmēsim:
p s - saules starojuma plūsmas blīvums;
S s ir saules paneļu darba virsmas daļas laukums, kas saņem saules starojumu;
p o - no Zemes atstarotā starojuma plūsmas blīvums;
S o ir SB paneļu virsmas laukums, uz kura nonāk no Zemes atstarotais starojums.
Vispirms apskatīsim A gadījumu, kad no Zemes atstarotais starojums nonāk SB darba virsmā (1. un 3. att.).
Piedāvātajā sistēmā šajā orbītas posmā mēs novirzām normālu pret SB N darba virsmu no virziena S virzienā, no kura no Zemes atstarotais starojums nonāk SB, par aprēķināto vērtību leņķis starp N un D (3. att.), nodrošinot maksimālu SB elektroenerģijas ģenerēšanu no tiešā saules starojuma un no Zemes atstarotā starojuma kopējās ietekmes uz Saules sistēmas darba virsmu. Šo SB orientāciju veic, pagriežot N no S virzienā uz Zemes centru (uz to pusi, no kuras no Zemes atstarotais starojums nonāk SB) ar aprēķināto leņķa vērtību, kas noteikta šādi.
Kad N novirzās no S virzienā, no kura Saules panelī nonāk no Zemes atstarotais starojums par leņķi, darba vietā nonāk tiešā saules starojuma un no Zemes atstarotā starojuma plūsmu efektīvo vērtību summa P Saules paneļu virsmu aprēķina pēc formulas (sk., 57. lpp.):
Formulu leņķa vērtības aprēķināšanai, kas nodrošina maksimālo (29), iegūst, iestatot šīs izteiksmes atvasinājumu attiecībā pret nulli uz nulli:
Izteiksim p o S o no attiecības (29):
Aizstājot (33) ar (32), mēs iegūstam:
Apzīmēsim:
S s_max - SB paneļu maksimālais darba virsmas laukums.
Kopējā starojuma R ietekmē SB ģenerē strāvu I; starojuma plūsmas (p s S s_max) ietekmē SB ģenerē strāvu, kas vienāda ar I s_max. Kurā
Attiecības (34), ņemot vērā (36), izpaužas šādā formā:
Tagad aplūkosim gadījumu B, kad no Zemes atstarotais starojums nonāk SB aizmugurējā virsmā (2. un 4. att.).
Piedāvātajā sistēmā šajā orbītas posmā mēs novirzām normālu uz SB N o aizmugures virsmu no virziena S o virzienā, no kura no Zemes atstarotais starojums nonāk SB, līdz aprēķinātajai vērtībai. leņķa starp N o un S o (4. att.), nodrošinot maksimālu SB elektroenerģijas ģenerēšanu no tiešā saules starojuma kopējās ietekmes uz SB darba virsmu un SB aizmugurējo virsmu - no Zemes atstarotā starojuma. . Šī SB orientācija tiek veikta, pagriežot N no S o virzienā uz Zemes centru (virzienā, no kura no Zemes atstarotais starojums nonāk SB), kas ir līdzvērtīgs N pagriešanai no S prom no centra. Zemes (vai virzienā uz kosmosa kuģa rādiusa vektoru) , pēc aprēķinātās leņķa vērtības, ko nosaka šādi.
Kad N o novirzās no S o virzienā , no kura Zemes atstarotais starojums pienāk SB leņķī , leņķis starp virzienu N o un no Zemes atstarotā starojuma virzienu , kas pienāk SB pie avota . (punkts B) tiek noteikts ar attiecību:
Šajā gadījumā uz saules paneļu darba virsmas (tiešais saules starojums) un saules paneļu aizmugurējās virsmas (no Zemes atstarotais starojums) ieplūstošo starojuma plūsmu efektīvo vērtību summu P aprēķina pēc formulas:
Formulu leņķa vērtības aprēķināšanai, kas nodrošina maksimālo (40), iegūst, iestatot šīs izteiksmes atvasinājumu attiecībā pret nulli uz nulli:
Izteiksim p o S o no attiecības (40):
Tādējādi tiek iegūti vienādojumi (37) un (46) SB optimālo griešanās leņķu atrašanai gadījumiem A un B. Šo vienādojumu atrisināšana tiek nosacīti veikta, izmantojot iterācijas metodi saskaņā ar šādu procedūru.
Iesniegsim vienādojumus (37) un (46) attiecīgi šādā formā:
Funkcijas (47) un (48) labajā pusē apzīmēsim kā:
Apskatāmā vienādojuma atrisinājumu apzīmēsim ar o.
Pirmajā iterācijā funkcijā (49) mēs aizstājam vērtību, kas vienāda ar 1 - vēlamās vērtības o sākotnējo tuvinājumu, kurai mēs ņemam 0° (varat arī ņemt pašreizējo leņķa vērtību starp N un S):
Soļiem i=1, 2, 3,... veicam iteratīvu procesu, kura katrā i-tajā solī atrodam i+1 - jaunu tuvinājumu vēlamajai vērtībai o - pēc formulas:
Šajā gadījumā katrs jauns tuvinājums būs tuvāks vēlamajai vērtībai o nekā iepriekšējais. Iteratīvo procesu pārtraucam, ja starpība starp iegūto jauno tuvinājumu i+1 un iepriekšējo tuvinājumu i ir mazāka par nepieciešamo aprēķinu precizitāti:
jo turpmāk katrs jauns tuvinājums atšķirsies no iepriekšējā tuvinājuma par summu, kas mazāka par . Šajā gadījumā vēlamā vērtība o, uz kuru saplūst secīgo tuvinājumu secība i+1, i=1, 2, 3,..., arī atšķiras no pēdējā iegūtā tuvinājuma ne vairāk kā par .
Tādējādi, ņemot vērā nepieciešamo aprēķinu precizitāti, tiek iegūta vēlamā o vērtība:
No Zemes atstarotais starojums ir jāņem vērā, kad nosacījums ir izpildīts
kad no Zemes atstarotā starojuma dēļ, kas skar saules paneļa darba vai aizmugures virsmu, strāvas vērtība no saules paneļa pārsniedz maksimālo iespējamo strāvas vērtību, kas iegūta, ja nav no Zemes atstarotā starojuma, kas skar saules paneli , kas reizināts ar koeficientu, ņemot vērā pašreizējo iespējamo kosmosa kuģa konstrukcijas saules paneļa elementu darba virsmas ēnojumu.
Laukuma S s pašreizējo vērtību aprēķina šādi. 6. attēlā, kurā ir izskaidrotas nepieciešamās ģeometriskās konstrukcijas, ir norādīts:
X sb , Y sb ir ar SB saistītās Dekarta koordinātu sistēmas koordinātu asis, X sb ass ir vērsta normāli pret SB darba virsmu.
P 1 P 2 - SB darba virsma;
K 1 K 2 - kosmosa kuģa konstrukcijas elements, kas aizēno SB darba virsmu;
P 1 P p - SB darba virsmas daļa, aizēnota ar elementu K 1 K 2;
R r R 2 - SB darba virsmas apgaismota daļa;
P k ir elementa K 1 K 2 projekcijas galējais punkts uz SB darba virsmu.
Apsveriet taisnstūra SB darba virsmu. Punktu P 1 (0; y 1) un P 2 (0; y 2) koordinātas koordinātu sistēmā, kas saistīta ar SB, ir nemainīgas, un visa SB darba virsmas laukuma vērtība S s_max tiek dota pēc formulas:
kur L ir SB lineārais izmērs pa Z asi sb Dekarta koordinātu sistēmā, kas saistīta ar SB.
Pamatojoties uz kosmosa kuģa orientācijas parametru mērījumiem un satelīta pozīciju attiecībā pret kosmosa kuģi, mēs nosakām kosmosa kuģa konstrukcijas elementu koordinātas, kas aizēno satelīta darba virsmu koordinātu sistēmā, kas saistīta ar satelītu. Iegūtās ēnojuma elementa K 1 K 2 galējā punkta koordinātas koordinātu sistēmā, kas saistīta ar SB, apzīmēsim kā K 2 (x k; y k).
Tad punkta P k koordinātas ir vienādas ar (0; y k), un tiek noteikta punkta P p koordināte y p (0; y p) - punkts, kas atdala SB darba virsmas apgaismotās un iekrāsotās daļas. pēc formulas
Laukuma S s pašreizējo vērtību aprēķina pēc formulas:
Piedāvātās sistēmas blokshēma, kas parādīta 7. attēlā, satur šādus blokus:
1 - SB; 2 - GSE; 3 - UPSB; 4 - UPU; 5 - BUOSBS; 6 - BRSBZP; 7 - BRT;
8 - DT; 9 - AUTOBUSI;
10 - kosmosa kuģa orbītas augstuma mērīšanas vienība (BIVOKA);
11 - kosmosa kuģa orientācijas mērvienība (BIOKA);
12 - vienība Saules pacēluma leņķa mērīšanai virs Zemes horizonta, kas redzams no kosmosa kuģa (BIUVSVGZ);
13 - bloks saules paneļu radītās maksimālās strāvas vērtības iestatīšanai tiešā saules starojuma ietekmē (BZMTVSBVPSI);
14 - bloks no Zemes atstarotā starojuma momentu noteikšanai pret saules paneļu darba virsmu (BOMPOSIRPSB);
15 - bloks no Zemes atstarotā starojuma momentu noteikšanai pret saules paneļu aizmugurējo virsmu (BOMPOSITPSB);
16 - bloks papildu elektroenerģijas ģenerēšanas momentu noteikšanai ar saules baterijām no Zemes atstarotā starojuma ietekmē (BOMGSBDEVOZI);
17 - bloks saules paneļu griešanās leņķa noteikšanai (BOUPSB);
18 - bloks saules paneļu darba virsmas daļas laukuma noteikšanai, ko apgaismo saules starojums (BOPOSIRPSB);
19, 20 - pirmā un otrā atslēga;
21 - elements NAV;
22 — VAI elements,
šajā gadījumā GSE (2) izeja ir savienota ar BRT (7) ieeju. BRT izeja (7) ir savienota ar DT ieeju (8). BUOSBS (5) un BRSBZP (6) izejas ir attiecīgi savienotas ar UPU (4) pirmo un otro ieeju. UPU (4) izeja ir savienota ar UPS (3) ieeju. UPSB (3) izeja ir savienota ar pirmajām BUOSBS (5) un BRSBZP (6) ieejām. DT izeja (8) ir savienota ar pirmajām ieejām BOUPSB (17) un BOMGSBDEVOSI (16). Izeja un otrā līdz ceturtā ieeja BOMGSBDEVOSI (16) ir savienotas attiecīgi ar elementa NOT ieeju (21) un BZMTVSBVPSI (13), VAI elementa (22) un BOPOSIRPSB (18) izejām. BOPOSIRPSB (18) pirmā un otrā ieeja un izeja ir arī pievienota attiecīgi BIOKA (11), UPSB (3) un BOUPSB (17) otrajai ieejai. BOUPSB (17) izeja un trešā līdz astotā ieeja ir savienotas attiecīgi ar BRSBZP otro ieeju (6) un UPSB (3), BZMTVSBVPSI (13), BIVOKA (10), BOMPOSIRPSB (14) izejām. , BOMPOSITPSB (15), BIUVSVGZ (12). BIUVSVGZ (12) izeja ir savienota arī ar pirmajām BOMPOSIRPSB (14) un BOMPOSITPSB (15) ieejām. Otrās ieejas BOMPOSIRPSB (14) un BOMPOSITPSB (15) ir savienotas ar BIVOKA (10) izeju. Arī izejas BOMPOSIRPSB (14) un BOMPOSITPSB (15) ir pieslēgtas attiecīgi dažādām VAI elementa (22) ieejām. BUSES (9) izeja ir savienota ar pirmā un otrā taustiņa (19) un (20) informācijas ieejām. Pirmā un otrā taustiņa (19) un (20) vadības ieejas ir savienotas attiecīgi ar elementa NOT (21) un BOMGSBDEVOSI (16) izejām. Pirmā un otrā taustiņa (19) un (20) izejas ir attiecīgi savienotas ar BUOSBS otro ieeju (5) un BUOSSB (17) devīto ieeju.
7. attēlā ar punktētu līniju parādīts arī UPSB (3) mehāniskais savienojums ar SB korpusu (1) caur SB piedziņas izejas vārpstu.
Sistēma darbojas šādi.
Elektrība no GSE (2) tiek piegādāta BRT (7), pēc tam no kuras tā tiek piegādāta kosmosa kuģa SE SES. Šajā gadījumā BRT (7) ir savienots ar DT (8), kas mēra SB ģenerētās strāvas pašreizējo vērtību.
BIVOKA (10) tiek mērīta kosmosa kuģa orbītas augstuma vērtība.
BIOKA (11) tiek mērīti kosmosa kuģa orientācijas parametri.
BIUVSVGZ (12) nosaka Saules pacēluma leņķa vērtību virs Zemes horizonta, kas redzams no kosmosa kuģa.
BOMPOSIRPSB (14) nosaka laika momentus, kuros no Zemes atstarotais starojums var skart SB paneļu darba virsmu. Lai to izdarītu, tiek pārbaudīta nosacījuma (5) izpilde. Šajā blokā var ieviest arī sarežģītāku skaitļošanas shēmu, tostarp leņķa aprēķināšanu, izmantojot formulu (12) vai skaitļošanas procedūru (23)-(27) un pārbaudes nosacījumu (3). Ja nosacījumi (5), (3) ir izpildīti, BOMPOSIRPSB bloks (14) ģenerē komandu, kas nonāk VAI elementa (22) pirmajā ievadē.
BOMPOSITPSB (15) nosaka laika momentus, kuros no Zemes atstarotais starojums var skart SB paneļu aizmugurējo virsmu. Lai to izdarītu, tiek pārbaudīta nosacījuma (6) izpilde. Šajā blokā var īstenot arī sarežģītāku skaitļošanas shēmu, tostarp leņķa aprēķināšanu, izmantojot formulu (13) vai skaitļošanas procedūru (23)-(27) un pārbaudes nosacījumu (10). Ja nosacījumi (6), (10) ir izpildīti, BOMPOSITPSB bloks (15) ģenerē komandu, kas nonāk VAI elementa (22) otrajā ieejā.
Kad komanda tiek saņemta jebkurā no divām VAI elementa (22) ieejām, komanda tiek ģenerēta VAI elementa (22) izejā un tiek nosūtīta uz atbilstošo BOMGSBDEVOSI (16) ievadi. Ņemiet vērā, ka BOMPOSIRPSB (14) un BOMPOSITPSB (15) bloki nevar vienlaicīgi ģenerēt komandas, jo tie pārbauda savstarpēji izslēdzošu ģeometrisko nosacījumu izpildi.
BOPOSIRPSB (18) tiek noteikts tās Saules sistēmas darba virsmas daļas laukums, kuru pašlaik apgaismo tiešais saules starojums. Pamatojoties uz ievades informāciju par kosmosa kuģa orientācijas parametriem, kas nāk no BIOKA (11) un SB pozīcijas leņķi attiecībā pret kosmosa kuģi, kas nāk no UPSB (3), BOPOSIRPSB bloks (18) īsteno skaitļošanas procedūru (56)- (57).
BOMGSBDEVOSI (16) tiek noteikti no Zemes atstarotā SB starojuma izmantošanas momenti - SB papildu elektroenerģijas ģenerēšanas momenti no Zemes atstarotā starojuma ietekmē. Šie momenti atbilst vienlaicīgai nosacījuma (54) izpildei un nosacījumiem, lai no Zemes atstarotais starojums nonāktu SB paneļu darba vai aizmugurējā virsmā (pēdējie nosacījumi ir izpildīti BOMPOSIRPSB (14) un BOMPOSITPSB (15)). bloki). Ja vienlaikus tiek izpildīts nosacījums (54) un tiek saņemts signāls no VAI elementa (22), BOMGSBDEVOSI bloks (16) ģenerē komandu, kas nonāk elementa NOT (21) ievadē un atslēgas ( 20).
Ja nosacījums (54) nav izpildīts vai netiek saņemts signāls no VAI elementa (22) BOMGSBDEVOSI (16) izejā, komanda netiek ģenerēta. Tad elements NOT (21) ģenerē komandu, kas tiek nosūtīta uz atslēgas (19) vadības ievadi. Šajā gadījumā atslēga (20) ir aizvērta un atslēga (19) ir atvērta.
Šajā taustiņu (19) un (20) stāvoklī vadības komanda no BUSES (9) caur atvērto taustiņu (19) nonāk BUSBS blokā (5), kas kontrolē SB (1) orientāciju uz Sv. BUOSBS (5) var tikt ieviests, pamatojoties uz kosmosa kuģa kustības un navigācijas vadības sistēmu (VCS) (sk.). Satelīta vadības algoritma ievades informācija ir: vienības virziena vektora pozīcija pret Sauli attiecībā pret koordinātu asīm, kas saistītas ar kosmosa kuģi, ko nosaka kuģa kinemātiskās kontūras algoritmi; SB pozīcija attiecībā pret kosmosa kuģa korpusu, kas iegūta pašreizējo izmērīto leņķa vērtību veidā ar UPSB tālvadības pulti (3). Vadības algoritma izejas informācija ir komandas, lai pagrieztu SB attiecībā pret UPSB (3) izejas vārpstas asi, komandas, lai apturētu rotāciju. UPSB tālvadības pults (3) nodrošina signālus par SB (1) pozīciju.
Kad BOMGSBDEVOSI (16) izdod komandu, kas nonāk pie atslēgas (20) un elementa NOT (21) vadības ievades, tad elements NOT (21) neģenerē komandu atslēgas (19) vadības ieejā. Šajā gadījumā atslēga (20) ir atvērta un atslēga (19) ir aizvērta.
Šajā taustiņu (19) un (20) stāvoklī vadības komanda no BUSES (9) caur publisko atslēgu (20) tiek nosūtīta uz BUPSB (17).
Kad tiek saņemta komanda no BUSES (9) uz ieeju BOUPSB (17), BOUPSB bloks (17) atkarībā no komandām, kas saņemtas no blokiem BOMPOSIRPSB (14) un BOMPOSITPSB (15), aprēķina rotācijas leņķi SB = o. izmantojot skaitļošanas procedūras (47)– (53). Šajā gadījumā leņķi aprēķina arī, izmantojot formulas (12), (13) vai (19), (23)-(27). Aprēķiniem tiek izmantotas vērtības, I, I s_max, S s, g, H o, kas nāk no UPSB (3), DT (8), BZMTVSBVPSI (13), BOPOSIRPSB (18), BIUVSVGZ (12). ), BIVOKA (10). =
Bloku BOMPOSIRPSB (14), BOMPOSITPSB (15), BOMGSBDEVOSI (16), BOUPSB (17), BOPOSIRPSB (18) ieviešana iespējama gan uz kosmosa kuģa lidojumu vadības centra (MCC) aparatūras un programmatūras bāzes, gan iekāpt kosmosa kuģī. BUSES (9) ieviešanas piemērs var būt kosmosa kuģa Yamal-100 borta sistēmu pakalpojumu vadības kanāla (SCU) radio līdzekļi, kas sastāv no zemes stacijas (ES) un borta aprīkojuma (BA) (sk. apraksts iekšā). Jo īpaši BA SKU kopā ar 3D SKU atrisina problēmu ar digitālās informācijas (DI) izsniegšanu kosmosa kuģa iebūvētajai digitālajai datorsistēmai (OBDS) un tās turpmāko apstiprināšanu. BCWS savukārt kontrolē blokus BUOSBS (5), BOUPSB (17), BRSBZP (6).
UPU (4) spēlē interfeisa lomu starp BUOSBS (5), BRSBZP (6) un UPSB (3) un kalpo, lai pārveidotu ciparu signālus analogos un pastiprinātu pēdējos.
BIVOKA (10), BIOKA (11), BIUVSVGZ (12) var izgatavot, pamatojoties uz kosmosa kuģa sensoriem un aprīkojumu (sk.,). BZMTVSBVPSI (13), BOMPOSIRPSB (14), BOMPOSITPSB (15), BOMGSBDEVOSI (16), BOUPSB (17), BOPOSIRPSB (18) ieviešanu var veikt, pamatojoties uz BTsVS. Taustiņi (19), (20), NOT elements (21), VAI elements (22) var tikt izgatavoti elementāru analogo shēmu veidā. SB (1), BFB (2), UPSB (3), UPU (4), BUOSBS (5), BRSBZP (6), BRT (7), DT (8) var izgatavot uz SES elementu bāzes (sk. ) .
Tādējādi tiek aplūkots sistēmas fundamentālo bloku ieviešanas piemērs, uz kura rezultātiem tiek pieņemts lēmums un īstenotas piedāvātās darbības.
Aprakstīsim piedāvāto izgudrojumu tehnisko efektu.
Piedāvātie tehniskie risinājumi nodrošina maksimālu elektroenerģijas ražošanu no kopējās ietekmes uz saules paneli tiešā saules starojuma, kas nonāk uz saules paneļu darba virsmas, un starojuma, kas atstarots no Zemes, nonākot saules paneļu darba vai aizmugurējā virsmā, ņemot ņem vērā iespējamo saules paneļa darba virsmas ēnojumu ar kosmosa kuģa konstrukcijas elementiem. Šajā gadījumā elektroenerģijas saņemšanas palielinājums no saules paneļa tiek panākts, palielinot no Zemes atstarotā starojuma saules paneļu virsmu darba un aizmugures puses izmantošanu, piedāvātajos laika intervālos veicot ierosināto saules paneļa pagriezieni no Saules virziena noteiktā virzienā, ko nosaka no Zemes atstarotā starojuma pienākšanas virziens uz kosmosa kuģi, līdz aprēķinātajam leņķim, kas noteikts ar piedāvāto metodi.
Ilustrācijai 8. attēlā parādīts grafiks, kurā parādīts elektrības ienākšanas grafiks no SB PC MKC I(A) pret laiku t (s) orbītas apgrieziena laikā, saglabājot SB orientāciju uz Sauli: 02.02.2004, orbīta 1704 , laiks 17.35-19.06 DVM, ISK orientācija (sk.). Grafikā parādīts pašreizējais līmenis I s_max un atzīmēti laika intervāli T 1, T 2, kas atrodas orbitālās apgrieziena apgaismotās daļas sākumā un beigās un atbilst brīžiem, kad ir izpildīts nosacījums (3), un laika intervāls T o atrodas orbītas apgaismotās daļas vidusdaļā un atbilst nosacījuma (10) izpildes momentiem. Grafiks parāda, ka nosacījums (54) ir izpildīts šajos intervālos, t.i. Uz SB paneļu virsmas papildus tiek uztverts no Zemes atstarots starojums, un SB pagriešana par aprēķināto leņķi = o ļauj palielināt SB elektroenerģijas ražošanu kopējā uz SB paneļu virsmas nonākošā starojuma ietekmē.
LITERATŪRA
1. Elisejevs A.S. Kosmosa lidojumu tehnoloģija. M.: Mašīnbūve, 1983. gads.
2. Raušenbahs G. Saules paneļu projektēšanas rokasgrāmata. M.: Energoatomizdat, 1983. gads.
3. Kovtuns V.S., Solovjovs S.V., Zaikins S.V., Gorodetskis A.A. Kosmosa kuģa saules paneļu stāvokļa kontroles metode un sistēma tās ieviešanai. Izgudrojuma apraksts RF patentam Nr.2242408 saskaņā ar 2003.gada 24.marta pieteikumu 2003108114/11.
4. Kroškins M.G. Kosmosa izpētes fiziskie un tehniskie pamati. - M.: Mašīnbūve. 1969. gads.
5. Kondratjevs K.Ja. Aktinometrija. - M.: Gidrometeoizdat. 1965. gads.
6. Grilihess V.A., Orlovs P.P., Popovs L.B. Saules enerģija un lidojumi kosmosā. M.: Nauka, 1984. gads.
7. Kosmosa kuģa kustības kontroles un navigācijas sistēma. Tehniskais apraksts. 300 GK.12 ju. 0000-ATO. RSC Energia, 1998. gads.
8. Jamalas kosmosa kuģa dienesta vadības kanāla Zemes stacija. Rokasgrāmata. ZSKUGK.0000-0RE. RSC Energia, 2001.
9. Jamalas kosmosa kuģa dienesta vadības kanāla borta aprīkojums. Tehniskais apraksts. 300 GK.15 ju. 0000A201-OTO. RSC Energia, 2002.
10. Inženierzinātņu rokasgrāmata par kosmosa tehnoloģijām. PSR Aizsardzības ministrijas izdevniecība M., 1969.g.
11. Kosmosa kuģa barošanas sistēma. Tehniskais apraksts. 300 GK.20 ju. 0000-ATO. RSC Energia, 1998. gads.
12. Ruļevs D.N., Stažkovs V.M., Korņejevs A.P., Panteļeimonovs V.N., Meļņiks I.V. Starptautiskās kosmosa stacijas Krievijas segmenta saules paneļu efektivitātes novērtējums, pamatojoties uz telemetrisko informāciju // Proceedings of the XXXIX Readings, kas veltīti K.E.Ciolkovska zinātniskā mantojuma attīstībai un ideju attīstībai (Kaluga, 14.-16.septembris) , 2004). Sadaļa “Raķešu un kosmosa tehnoloģiju problēmas”. - Kazaņa: nosaukta Kazaņas Valsts universitāte. V.I.Uļjanovs-Ļeņins. 2005. gads.
PRETENZIJA
Sistēma kosmosa kuģa saules paneļu stāvokļa kontrolei, uz kuriem ir uzstādīti fotoelektrisko bateriju bloki ar pozitīvu aizmugurējās virsmas izejas jaudu, kas satur ierīci saules paneļu rotēšanai, pastiprināšanas-pārveidošanas ierīci, vadības bloku orientācijai saules bateriju paneļu pret Sauli, iekārta saules paneļu pagriešanai noteiktā pozīcijā, strāvas regulatora bloks, strāvas sensors, barošanas sistēmas vadības bloks, kurā fotogalvaniskā akumulatora bloka izeja ir savienota ar strāvas ieeju regulatora bloks, kura izeja ir savienota ar strāvas sensora ieeju, un vadības bloku izejas saules paneļu orientācijai pret Sauli un saules paneļu rotācija norādītajā pozīcijā ir pieslēgtas attiecīgi pie pastiprināšanas-pārveidojošās ierīces pirmā un otrā ieeja, kuras izeja ir savienota ar saules paneļa rotācijas ierīces ieeju, kuras izeja ir savienota ar saules paneļu orientācijas pret Sauli vadības bloku ieejām. un saules paneļu griešanās noteiktā stāvoklī, un saules paneļu rotācijas ierīces akumulatori ir mehāniski savienoti ar norādīto saules bateriju, kas raksturīgs ar to, ka tajā papildus ietilpst kosmosa kuģa orbītas augstuma mērīšanas vienība, agregāts kosmosa kuģa orientācija, mērvienība Saules pacēluma leņķa mērīšanai virs Zemes horizonta, kas redzama no kosmosa kuģa, mērvienība saules bateriju radītās strāvas maksimālās vērtības noteikšanai tiešā saules starojuma ietekmē, mērvienība lai noteiktu momentus, kad no Zemes atstarotais starojums skar saules bateriju darba virsmu, mērvienība, kas nosaka, kad no Zemes atstarotais starojums skar saules bateriju aizmugurējo virsmu, mērvienība, kas nosaka, kad saules baterijas rada papildu elektroenerģiju saules bateriju ietekmē. no Zemes atstarotais starojums, bloks saules paneļu griešanās leņķa noteikšanai, bloks saules paneļu darba virsmas laukuma noteikšanai, ko apgaismo saules starojums, divi taustiņi un elementi “NOT” un “OR”, kamēr strāvas sensora izeja ir savienota ar saules paneļu griešanās leņķa noteikšanas bloka un papildu elektroenerģijas saules bateriju ģenerēšanas momentu noteikšanas bloka pirmajām ieejām no Zemes atstarotā starojuma ietekmē, izejas un ieejas - no otrās līdz ceturtajai - ir savienotas attiecīgi ar elementa "NOT" ieeju un bloka izejām saules bateriju radītās maksimālās strāvas vērtības iestatīšanai tiešās saules enerģijas ietekmē. starojums, elements "OR" un bloks saules paneļu darba virsmas daļas laukuma noteikšanai, ko apgaismo saules starojums, kura pirmā un otrā ieeja un izeja arī ir attiecīgi savienotas ar izejām kosmosa kuģa orientācijas mērīšanas vienība, saules paneļu pagriešanas ierīce un bloka otrā ieeja saules paneļu griešanās leņķa noteikšanai, izeja un ieejas - ar trešo līdz astotajam -, kas ir attiecīgi savienotas , uz otro bloka ieeju saules paneļu pagriešanai noteiktā pozīcijā un saules paneļu pagriešanas ierīces izejām, bloku saules paneļu radītās strāvas maksimālās vērtības iestatīšanai tiešās saules enerģijas ietekmē starojums, bloks kosmosa kuģa orbītas augstuma mērīšanai, bloki no Zemes atstarotā starojuma trieciena momenta noteikšanai uz saules paneļu darba un aizmugures virsmām un vienība Saules pacēluma leņķa mērīšanai virs No kosmosa kuģa redzamais Zemes horizonts, kura izeja ir savienota arī ar bloku pirmajām ieejām, lai noteiktu momentus, kad no Zemes atstarotais starojums skar saules paneļu darba un aizmugurējās virsmas, kuru otrās ieejas ir savienotas ar kosmosa kuģa orbītas augstuma mērīšanas bloka izvadi, savukārt no Zemes atstarotā starojuma momentu noteikšanas vienību izejas ir pieslēgtas attiecīgi arī saules paneļu darba un aizmugurējām virsmām. elementa "OR" ieejas, un barošanas sistēmas vadības bloka izeja ir savienota ar pirmā un otrā taustiņa informācijas ieejām, kuru vadības ieejas ir savienotas ar elementa "NOT" izejām un bloka nosakot saules paneļu papildu elektroenerģijas ģenerēšanas momentus no Zemes atstarotā starojuma ietekmē, un pirmā un otrā taustiņa izejas tiek savienotas attiecīgi ar saules orientācijas vadības bloka bateriju otro ieeju virzienā Saule un bloka devītā ieeja saules bateriju griešanās leņķa noteikšanai.
Viens acīmredzams veids, kā uzlabot saules elektrostaciju efektivitāti, ir izmantot tajās saules enerģijas izsekošanas sistēmas. Izsekošanas sistēmu izstrāde ar vienkāršu apkopi būtiski uzlabos lauksaimniecības objektu tehniskos un ekonomiskos rādītājus un radīs komfortablus darba un dzīves apstākļus cilvēkiem, vienlaikus nodrošinot vides ekoloģisko drošību. Sekošanas sistēmas var būt ar vienu vai divām saules paneļu rotācijas asīm.
Saules elektrostacija ar izsekošanas sistēmu, ieskaitot kompaktu fotoelektrisku saules stāvokļa sensoru, kas sastāv no taisnas trīsstūrveida prizmas formas rāmja, kura divās sānu virsmās atrodas fotoelementi saules izsekošanai, bet trešajā pusē ir ir komandu fotoelements moduļu pagriešanai no rietumiem uz austrumiem. Dienas gaišajā laikā izsekošanas fotoelementi sensora malās izdod komandas signālus vadības blokam saules moduļa azimutālās rotācijas piedziņai, kas, izmantojot vārpstu, griežas saules virzienā. Instalācijas trūkums ir nepietiekama saules izsekošanas precizitāte.
Saules elektrostacijā ir saules baterija ar biaksiālu orientācijas sistēmu pret sauli, uz kuras kā saules izsekošanas sensori ir uzstādīti fotoelektriskie moduļi, kas satur lineāros fotodetektorus, kas atrodas cilindrisko Fresnel lēcu perēkļos. Fotodetektoru signāli, izmantojot mikroprocesoru, kontrolē saules baterijas azimutālās un zenitālās orientācijas sistēmas piedziņas.
Šīs instalācijas trūkums ir nepietiekama saules izsekošanas precizitāte, kā arī fakts, ka izsekošanas sensori aizņem daļu no saules baterijas aktīvās zonas.
Izstrādes galvenais mērķis ir uzlabot saules izsekošanas sensora precizitāti biaksiālo saules paneļu orientācijas sistēmām jebkurā saules pozīcijā debesīs visa gada garumā.
Iepriekš minētais tehniskais rezultāts tiek panākts ar to, ka piedāvātajā saules izsekošanas sensorā ir biaksiāla saules baterijas orientācijas sistēma, kas satur uz fiksētas platformas uzstādītu staru uztveršanas šūnu bloku, kas ir izgatavoti apgrieztu konusu veidā. ar necaurspīdīgām sienām un uzstādīts uz fotoelektrisko elementu konusu šaurajiem galiem. Šajā gadījumā staru uztverošās šūnas ir cieši uzstādītas uz platformas, veidojot 160° cieto leņķi un ierāmētas ar caurspīdīgu sfēru, kas uzstādīta uz platformas, kas ir uzstādīta ar slīpumu pret horizontāli leņķī, kas vienāds ar sensora atrašanās vietas ģeogrāfiskais platums.
Izsekošanas sensors ir uzstādīts uz stacionāras platformas, no kurām parastais 6 (1. att.) ir vērsts uz dienvidiem. Vietnes slīpuma leņķis pret horizontālo pamatni atbilst apgabala ģeogrāfiskajam platumam, kas atrodas blakus saules baterijai, kas novietota uz mehāniskas saules orientācijas sistēmas, kas satur zenitālās un azimutālās rotācijas piedziņas, izmantojot pakāpju zobratu motorus. Saules bateriju piedziņas vada mikroprocesors, kas saņem elektriskos impulsus no sensoru elementu fotoelektriskajiem elementiem. Mikroprocesors satur informāciju par saules baterijas atrašanās vietas ģeogrāfisko platumu, elektroniskais pulkstenis, kas aprīkots ar kalendāru, kura signāli iedarbina reduktorus saules baterijas zenitālajai un azimutālajai rotācijai atbilstoši kustības vienādojumam. no saules debesīs. Šajā gadījumā sasniegto saules baterijas griešanās leņķu vērtības, pamatojoties uz signāliem no sensoru elementu fotoelektriskajiem elementiem, tiek salīdzinātas ar vērtībām, kas iegūtas no saules kustības vienādojuma pie strāvas. laiks.
Sensora konstrukcijas būtība ir parādīta attēlā. 1, 2, 3 un 4. Attēlā. 1 un 3 parāda sensora vispārējo diagrammu. Attēlā 2. attēlā parādīts caurspīdīgas sfēras un staru uztveršanas šūnu skats no augšas. Attēlā 4. attēlā parādīta šādas šūnas diagramma.
Saules izsekošanas sensors biaksiālai saules paneļa orientācijas sistēmai satur platformu 1, kas piestiprināta pie horizontālas pamatnes 5 leņķī, kas vienāds ar apgabala platuma grādiem. Uz platformas 1 ir piestiprināta caurspīdīga puslode 2 ar rādiusu r. Visā sfēras 2 iekšējā telpā ir cieši nostiprinātas staru uztverošās šūnas 3, kurām ir apgriezta konusa forma ar necaurspīdīgām sienām 7, kas vērstas pret iekšējo sienu. caurspīdīgās sfēras 2 ar diametru φ un diametru d 2 uz vietu 1. Konusa 3 augstums ir vienāds ar attālumu h no sfēras 2 iekšējās sienas līdz platformas 1 virsmai. Konusa 3 apakšējā daļā 5d 1 attālumā no konusa 3 augšējās malas atrodas fotoelektrisks elements 4, no kura plūst elektriskais signāls. tiek pārraidīts uz mikroprocesoru sistēmu, lai kontrolētu saules bateriju asu rotāciju (nav parādīts 1. attēlā) . Attālums 5d 1 ir izvēlēts tā, lai saules stars 8 tiktu precīzi uztverts uz fotoelektriskā elementa 4, ko ierobežo konusa 3 necaurspīdīgās sienas 7.
Saules izsekošanas sensors darbojas šādi. Saules stari 8 iekļūst cauri caurspīdīgajai sfērai 2, konusa 3 iekšējai telpai un nokrīt uz fotoelektrisko elementu 4, izraisot elektrisko strāvu, ko analizē mikroprocesors un pārraida uz saules baterijas pakāpju motora-pārvadu piedziņām. orientācijas sistēma (nav parādīta attēlā). Saulei virzoties pa debesīm, tās stari 8 pakāpeniski ieslēdz fotoelektriskos elementus 3 un veicina precīzu un vienmērīgu saules baterijas rotācijas regulēšanu pa azimutālo un zenitālo asi.
Sensoru elementu izkārtojuma laboratorijas testi, izmantojot saules starojuma simulatoru, uzrādīja pieņemamus gaismas plūsmas nogriešanas rezultātus pieņemtajām vērtībām d 1 , d 2 un 5 d x.
Divasu saules bateriju orientācijas sistēmas saules izsekošanas sensors satur staru uztveršanas šūnas, kas izgatavotas apgrieztu konusu veidā, kas ir cieši uzstādītas vietā, veidojot 160° leņķi un ierāmētas ar caurspīdīgu sfēru, kas ļauj precīzāk orientēt saules paneļus un tādējādi saņemot no tiem vislielāko elektroenerģijas daudzumu.