При строительстве загородных домов, домиков на дачных участках, теплиц, различных фермерских построек все чаще стали применяться автономные системы электрообеспечения. Солнечные батареи обеспечивают независимость от общих электрических сетей. Да и в городах в частном секторе нередко можно увидеть на крышах домов солнечные панели домашних электростанций.
Эти панели могут быть с моно- и поликристаллическими кремниевыми структурами, могут быть построены на базе батарей, выполненных по аморфной или микроморфной технологии, могут быть даже использованы солнечные батареи, выполненные по технологии «Moth Eye» («Глаз мотылька»). При этом каждое здание строится таким образом, чтобы солнечные панели были установлены в месте, максимально освещаемом солнцем.
Эффективность современных гелиевых систем в среднем не превышает 18% - 20%. У лучших образцов эффективность может достигать 25%. В 2014 году ученые Австралийского центра UNSW по усовершенствованию фотовольтаики сообщили, что им удалось добиться эффективности солнечных батарей в 40%.
При этом нужно понимать, что измерение величины эффективности производится, когда гелиевая панель освещается солнцем под прямым углом. Если солнечная батарея закреплена стационарно, то в течение дня, когда солнце перемещается по небосводу, период прямого освещения батареи солнцем будет относительно небольшим. И поэтому эффективность даже самых совершенных солнечных панелей будет снижаться.
Для того чтобы минимизировать снижение эффективности гелиевых систем, солнечные панели должны устанавливаться на поворотных модулях, которые позволят в течение всего светового дня ориентировать батареи на солнце. Такое поворотное устройство, на котором закреплена несущая конструкция с одной или несколькими солнечными панелями, называется трекером.
Он предназначен для того, чтобы следить за солнцем, и, в зависимости от его положения, ориентировать на него солнечную панель. Это устройство, в зависимости от исполнения, включает в себя один или два датчика слежения за солнцем, а также поворотный механизм. Трекер должен быть установлен в хорошо освещаемом солнцем месте на земле, на стационарной станине, либо на мачте, которая поднимет трекер на такую высоту, чтобы солнечная батарея всегда была освещена солнцем.
Трекер с четырьмя солнечными панелями на мачте
Даже простейшее поворотное устройство с системой слежения за солнцем позволяет получить максимальный коэффициент полезного действия от гелиевых батарей. Как показали исследования, при отсутствии должной ориентации солнечных панелей на солнце теряется до 35% мощности. Поэтому, чтобы выйти на запланированную мощность в случае неподвижного крепления фотоэлементов, приходится устанавливать большее количество панелей.
Принцип построения систем управления поворотом солнечных батарей
Промышленностью выпускается несколько видов систем управления поворотом солнечных батарей. Это достаточно дорогие (до 100000 рублей) устройства, которые могут управлять положением сразу нескольких гелиевых панелей.
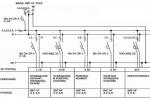
Поскольку солнце в течение дня перемещается не только по горизонтали, но и по вертикали, то эти системы управления отслеживают оба изменения положения и, в соответствии с полученной информацией, выдают команды на поворот панели вокруг горизонтальной или вертикальной осей. В общем случае такая система управления состоит из солнечного датчика, преобразователя (П) сигнала с этого датчика, усилителя (У) сигнала, микроконтроллера (МК), устройства управления двигателем (УУД), самого двигателя и, наконец, непосредственно рамы, на которой крепится гелиевая панель.

Схема управления трекера
Характерно, что для управления поворотом в обеих осях используется одна и та же схема. Различны только датчики положения солнца и двигатели. Простейший датчик положения солнца состоит из двух фотодиодов, разделенных непрозрачной перегородкой.
В зависимости от того, за каким перемещением следит этот датчик, перегородка устанавливается горизонтально или вертикально, но обязательно направлена строго на солнце. Пока оба фотодиода освещаются одинаково, сигналы, поступающие с них, равны. Как только солнце переместится настолько, что один из фотодиодов окажется в тени перегородки, происходит разбаланс сигналов и система управления вырабатывает соответствующую команду на поворот солнечной батареи.

Схема датчика положения солнца
В качестве двигателей для поворотной платформы используются, как правило, шаговые двигатели или реактивно-вентильные двигатели. В таких системах управления датчики слежения установлены на этой же платформе и поворачиваются вместе с нею, обеспечивая тем самым точную ориентацию гелиевой панели на солнце. Для надежной работы датчика необходимо предусмотреть защиту его от загрязнения, налипания снега, затенения оптики случайными предметами.
Существуют системы управления, в которых датчики слежения удалены от несущей поворотной платформы и находятся в месте, защищенном от подобных воздействий. В этом случае сигнал с датчиков поступает на сельсин-передатчик. Ориентируя датчик слежения на солнце, сельсин-передатчик передает управляющее воздействие на сельсин-приемник, который и поворачивает несущую платформу, направляя ее точно на солнце.
Система управления поворотом солнечных панелей на базе часового механизма
Промышленные установки – полностью укомплектованные гелиевые электростанции с двухосными поворотными модулями – достаточно дорогое удовольствие. Например, промышленный трекер UST-AADAT стоит порядка полутора миллионов рублей. Естественное желание всех владельцев солнечных электростанций – повысить выходную мощность, но при этом сократить расходы. В результате появились самодельные устройства, оригинальные по своему решению, в которых используются подручные материалы. И эти устройства вполне успешно управляют ориентацией панелей на солнце.
Один из вариантов такого устройства – система управления ориентацией гелиевых панелей, построенная на базе часового механизма. Для слежения за солнцем вовсе не обязательно использовать светоприемные устройства. Для этого достаточно взять обычные настенные механические часы. Подойдут даже старые ходики. Известно, что за один час солнце проходит по небосводу с востока на запад путь, соответствующий угловому перемещению на 15°. Поскольку для гелиевой панели такое угловое смещение не особенно критично, то достаточно включать поворотный механизм один раз в час.

Слежение за перемещением солнца по часам
Устройство для поворота гелиевой панели вокруг вертикальной оси может выглядеть следующим образом. В циферблате на расстоянии длины минутной стрелки от центра, в месте, соответствующем 12-ти часам, устанавливается неподвижный контакт. Подвижный контакт – на острие минутной стрелки.
Таким образом, каждые 60 минут будет происходить замыкание контактов и включаться двигатель, поворачивающий солнечную панель. Отключение двигателя можно организовать различными способами, например, конечным выключателем или реле времени. Если на циферблате установить еще один неподвижный контакт в месте, соответствующем 6-ти часам, то коррекция положения панели будет производиться через каждые полчаса.
В этом случае устройства отключения двигателя должны быть настроены на поворот несущей платформы на угол 7,5°.
Кроме того, при желании здесь же, на этом механизме, с помощью еще одной контактной группы, но уже на базе часовой стрелки можно собрать схему автоматического возврата солнечной панели в исходное положение. На базе этой же часовой стрелки можно собрать систему управления поворотом панели и вокруг горизонтальной оси. Пока часовая стрелка двигается до 12-ти часов, несущая рама поднимается вслед за солнцем. После 12-ти часов двигатель горизонтальной оси реверсируется, и солнечная панель начинает вращаться в обратном направлении.
Принцип водяных часов в системе управления поворотом солнечных панелей
Эта система была придумана девятнадцатилетней студенткой Иден Фулл из Канады. Она предназначена для управления одноосным трекером. Принцип работы следующий. Вращение производится вокруг горизонтальной оси. Солнечная панель устанавливается в начальное положение таким образом, чтобы солнечные лучи были перпендикулярны плоскости панели.
На одну сторону панели подвешивается емкость с водой, на противоположную сторону подвешивается груз, равновесный с емкостью, наполненной водой. В нижней части емкости проделывается небольшое отверстие, чтобы вода по каплям вытекала из этого сосуда. Размер этого отверстия подбирается экспериментально. По мере вытекания воды сосуд становится легче, и противовес медленно поворачивает раму с панелью.

Трекер на «водяных часах»
Подготовка трекера к работе заключается в том, что в опустевшую емкость заливается вода и солнечная панель устанавливается в исходное положение.
Эти два примера далеко не исчерпывают возможные варианты построения поворотных модулей. При небольшой фантазии можно получить простое, но очень эффективное устройство, которое гарантированно сможет повысить эффективность домашней гелиевой электростанции.
Попросил недавно друг собрать ему "гелиостат" для ориентации солнечной панели за солнцем, под использование небольших моторов. Схема была взята из просторов интернета, проверена авторская плата, работает. Но я нарисовал также свою печатную плату, покомпактней, в которой резисторы и конденсаторы можно ставить планарного типа SMD.
Далее идёт описание схемы от автора. Это устройство использует импульсное регулирование и автоматически способно ориентировать солнечную батарею по наилучшей освещенности. Принципиальная схема состоит из тактового генератора (DD1.1, DD1.2), двух интегрирующих цепей (VD1R2C2, VD2R3C3), такого же числа формирователей (DD1.3, DD1.4), цифрового компаратора (DD2), двух инверторов (DD1.5, DD1.6) и транзисторного коммутатора (VT1—VT6) направления вращения электродвигателя М1, управляющего поворотом платформы, на которой установлена солнечная батарея.
С подачей питания (от самой солнечной батареи или от аккумулятора) генератор на элементах DD1.1, DD1.2 начинает вырабатывать тактовые импульсы, следующие с частотой около 300 Гц. При работе устройства сравниваются длительности импульсов, сформированных инверторами DD1.3, DD1.4 и интегрирующими цепями VD1R2C2, VD2R3C3. Их крутизна меняется в зависимости от постоянной времени интегрирования, которая, в свою очередь, зависит от освещенности фотодиодов VD1 и VD2 (ток зарядки конденсаторов С2 и СЗ пропорционален их освещенности).
Сигналы с выходов интегрирующих цепей поступают на формирователи уровня DD1.3, DD1.4 и далее — на цифровой компаратор, выполненный на элементах микросхемы DD2. В зависимости от соотношения длительностей импульсов, поступающих на входы компаратора, сигнал низкого уровня появляется на выходе элемента DD2.3 (вывод 11) или DD2.4 (вывод 4). При равной освещенности фотодиодов на обоих выходах компаратора присутствуют сигналы высокого уровня.
Инверторы DD1.5 и DD1.6 необходимы для управления транзисторами VT1 и VT2. Высокий уровень сигнала на выходе первого инвертора открывает транзистор VT1, на выходе второго — VT2. Нагрузками этих транзисторов являются ключи на мощных транзисторах VT3, VT6 и VT4, VT5, которые коммутируют напряжение питания электродвигателя М1. Цепи R4C4R6 и R5C5R7 сглаживают пульсации на базах управляющих транзисторов VT1 HVT2. Направление вращения двигателя меняется в зависимости от полярности подключения к источнику питания. Цифровой компаратор не позволяет одновременно открыться всем ключевым транзисторам, и, таким образом, обеспечивает высокую надежность системы.
С восходом солнца освещенность фотодиодов VD1 и VD2 окажется различной, и электродвигатель начнет поворачивать солнечную батарею с запада на восток. По мере уменьшения разницы в длительностях импульсов, вырабатываемых формирователями, будет уменьшаться длительность результирующего импульса, и скорость поворота солнечной батареи плавно замедлится, что обеспечит ее точное позиционирование. Таким образом, при импульсном управлении вращение вала электродвигателя можно передавать платформе с солнечной батареей непосредственно, без применения редуктора.
В течение дня платформа с солнечной батареей будет поворачиваться вслед за движением солнца. С наступлением сумерек длительности импульсов на входе цифрового компаратора окажутся одинаковыми, и система перейдет в дежурный режим. В этом состоянии потребляемый устройством ток не превышает 1,2 мА (в режиме ориентации он зависит от мощности двигателя).
Аккумулятор гелиостата используется для накопления энергии, вырабатываемой солнечной батареей, и питания самого электронного блока. Поскольку электродвигатель включается лишь для поворота батареи (на короткое время), выключатель питания не предусмотрен. Данная схема ориентирует солнечную батарею в горизонтальной плоскости. Однако при ее позиционировании следует учитывать географическую широту местности и время года. Если дополнить конструкцию блоком вертикального отклонения, собранным по аналогичной схеме, можно полностью автоматизировать ориентацию батареи в обеих плоскостях.
Для защиты фотодиодов от избыточного облучения применен зеленый светофильтр. Между фотодатчиками помещают непрозрачную шторку. Ее закрепляют перпендикулярно плате с таким расчетом, чтобы при изменении угла освещения она затеняла один из фотодиодов. Подробнее читайте в статье в прилагаемом архиве . Общий вид печатной платы:

После сборки проверил работу прибора - всё срабатывает как надо, при засвете одного и второго светодиода срабатывает мотор по часовой и против часовой стрелки.

Радиатор несколько великоват, столь большого размера не требуется, но другу такой понравился, потом сказал порежет на две половины для двух готовых плат, тестирует пока, поскольку с мощностью моторов ещё не определился.

Эти радиаторы всё сняты с блоков питания , у меня их много накопилось, а люди всё несут и несут. Разработка - И. Цаплин . Сборка и испытание схемы - Igoran .
Обсудить статью КОНТРОЛЛЕР ПОВОРОТА СОЛНЕЧНОЙ ПАНЕЛИ
Перспективы развития радиоастрономии, солнечной энергетики, космической связи, исследования поверхности Земли и других планет непосредственно связаны с возможностью вывода в космос крупногабаритных конструкций. В настоящее время в России и за рубежом ведутся исследования, направленные на создание в космосе конструкций различного класса, имеющих большие габариты: космические телескопы и антенны, энергетические и научные платформы, крупногабаритные солнечные батареи (СБ) и т. П.
Одним из важных и бурно развивающихся направлений в области создания крупногабаритных космических конструкций является разработка раскрывающихся панелей СБ, а также антенн, устанавливаемых на космических аппаратах (КА) различного назначения.
По мере увеличения размеров и сложности КА серьезным конструктивным ограничением становится требование к размещению КА под обтекателем ракет-носителей. Это обусловило создание КА, имеющих различные конфигурации при транспортировке и в рабочем состоянии на орбите. В состав КА входят трансформируемые конструкции различных антенн, откидных штанг с установленными на них приборами и датчиками, панелей СБ и другие, которые в космосе раскрываются и принимают форму, необходимую для функционирования на орбите. Таким образом, современные КА представляют собой совокупность тел, связанных между собой определенным образом. Как правило, КА имеет основной массивный блок, к которому крепятся трансформируемые конструкции (рис. В1).
1 - солнечная батарея; 2 - датчик ориентации на Солнце; 3 - всенаправленная антенна S-диапазона; 4 - антенна C-диапазона (диаметр 1,46 м); 5 - многоканальная антенна (излучатель фазированной антенной решетки); 6 - управляемая антенна (K-S-диапазон единичного доступа, K-диапазон для линии связи космос - космос) (диаметр 4,88 м); 7 - направление вектора орбитальной скорости; 8 - направление на Землю; 9 - 30-элементная фазированная антенная решетка S-диапазона (многоканальная линия связи); 10 - управляемая антенна K-диапазона (линия связи космос - Земля) (диаметр 1,98 м); 11 - антенна K-диапазона (диаметр 1,13 м)
Поэтому, для того чтобы современный КА поместился под обтекатель ракетоносителя, все трансформируемые конструкции должны быть определенным образом уложены в компактное транспортное положение. После вывода КА на определенную орбиту все трансформируемые конструкции раскрываются по заданной программе. В общем случае число этапов приведения трансформируемых конструкций в рабочее положение может быть довольно большим (рис. В2).

1 - начальная конфигурация элементов перед развертыванием; 2 - расчековка и развертывание панелей солнечных батарей; 3 - фиксация штанг солнечных батарей; 4 - развертывание антенны линии связи космос - Земля; 5 - развертывание антенны C-диапазона; 6 - отделение межорбитального буксира IDS; 7 - развертывание штанг антенн единичного доступа и вращение антенн; 8 - окончательная конфигурация после развертывания всех элементов
В процессе движения элементов трансформируемых конструкций происходит фиксация их в определенном положении, при этом движение осуществляется как с помощью электроприводов, так и за счет энергии деформации различного рода пружин.
Таким образом, проблема создания навесных систем специального функционального назначения с габаритами, превышающими габариты КА, сводится к разработке складных конструкций, удовлетворяющих таким противоречивым требованиям, как минимальные масса и объем в сложенном транспортном состоянии, высокая надежность раскрытия из транспортного состояния в рабочее положение и функционирования на орбите, максимальная площадь рабочей поверхности в раскрытом состоянии, стабильные эксплуатационные характеристики в условиях действия нагрузок. Работоспособность таких конструкций определяется главным образом тем, насколько велики возникающие в них силы при раскрытии, поэтому обеспечение их надежного раскрытия связано с решением сложных задач механики.
Несмотря на достигнутые значительные успехи в области проектирования таких конструкций, важной остается задача обеспечения плавного и надежного раскрытия крупногабаритных конструкций при гарантированном обеспечении их последующего функционирования.
Современные тенденции в развитии космической техники диктуют необходимость создания КА высокой энерговооруженности и повышенного срока эксплуатации - 15 лет и более. Рост энерговооруженности КА влечет за собой увеличение полезной площади крыла СБ (рис. В3).

При этом их необходимо разместить в зоне полезного груза существующих средств выведения КА на орбиту. В этих условиях очевиден только один выход - строить крыло СБ, увеличивая число панелей, которые на этапе выведения КА на орбиту складываются в рациональный пакет. При наземных экспериментах не удается в достаточной мере воспроизвести реальные условия процесса раскрытия СБ и тем самым полностью подтвердить надежность и работоспособность системы раскрытия. Отказ или нештатное функционирование системы раскрытия СБ практически всегда ведет к возникновению аварийных ситуаций. Применение методов математического моделирования существенным образом определяет качество, сокращает сроки и стоимость разработки раскрывающихся многозвенных СБ. Это обеспечивает возможность детального информационного сопровождения всего периода разработки, изготовления, экспериментальной отработки и эксплуатации СБ, включая анализ надежности, прогноз отказов и аварийных ситуаций.
Изобретение относится к электроснабжению космических аппаратов (КА) посредством солнечных батарей (СБ), дающих полезную мощность как с рабочей, так и с тыльной их поверхности. Предлагаемая система содержит устройство поворота СБ, усилительно-преобразующее устройство, блок управления ориентацией СБ по направлению на Солнце, блок разворота СБ в заданное положение, блок регуляторов тока, датчик тока, блок управления системой электроснабжения. В систему дополнительно введены блоки измерения: высоты орбиты КА, ориентации КА и угла возвышения Солнца над видимым с КА горизонтом Земли. Предусмотрен блок задания максимального значения тока, вырабатываемого СБ под воздействием прямого солнечного излучения. Введены также блоки определения: моментов попадания отраженного от Земли излучения на рабочую поверхность СБ, моментов попадания отраженного от Земли излучения на тыльную поверхность СБ, моментов генерации СБ дополнительной электроэнергии под воздействием отраженного от Земли излучения, угла поворота СБ и площади освещенной солнечным излучением части рабочей поверхности СБ. В схему включены также два ключа и элементы НЕ и ИЛИ. Технический результат изобретения состоит в увеличении выхода электроэнергии СБ путем более полной утилизации отраженного от Земли солнечного излучения, поступающего на рабочую и тыльную поверхности СБ, с учетом возможного затенения поверхности СБ элементами конструкции КА. 8 ил.
Рисунки к патенту РФ 2341421







Изобретение относится к области космической техники, а именно к системам электроснабжения (СЭС) космических аппаратов (КА), и может быть использовано при управлении положением панелей их солнечных батарей (СБ).
Для обеспечения высокой эффективности работы СБ на большинстве КА устанавливают систему их автоматической ориентации на Солнце (см. , стр.190-194; , стр.57). В состав такой системы, принятой за аналог, входят солнечные датчики, логически преобразующие устройства и электрические приводы, управляющие положением СБ. При работе системы панели СБ ориентируются таким образом, что угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце составляет минимальную величину, что обеспечивает максимальный приход электроэнергии от СБ.
Недостаток указанной системы управления положением СБ КА заключается в том, что в ней не предусмотрены операции выставки СБ в фиксированные расчетные положения, например, для защиты от негативного воздействия факторов внешней среды (ФВС). В виде ФВС могут выступать потоки высокоэнергетических частиц солнечного излучения или потоки газов, выходящих из работающих двигателей ориентации КА.
Наиболее близким из аналогов, принятым за прототип, является система управления положением СБ КА, описанная в , стр.6.
Блок-схема системы содержит СБ, на жесткой подложке корпуса которой расположен блок фотоэлектрических батареи (БФБ), устройство поворота СБ (УПСБ); усилительно-преобразующее устройство (УПУ); блок управления ориентацией СБ по направлению на Солнце (БУОСБС); блок разворота СБ в заданное положение (БРСБЗП); блок регуляторов тока (БРТ), блок АБ (БАБ); зарядное устройство для АБ (ЗРУ АБ); блок формирования команд на заряд АБ (БФКЗ АБ); датчик тока нагрузки (ДТН); блок управления системой энергоснабжения (БУСЭС); шина электроснабжения (ШЭ). При этом выход БФБ соединен с входом БРТ. Выход БРТ соединен с ШЭ. БАБ своим входом через ЗРУ АБ соединен с ШЭ. ЗРУ АБ подключено своим первым входом к ШЭ, а ко второму входу ЗРУ АБ подключен выход ДТН, вход которого подключен, в свою очередь, к ШЭ. БАБ своим выходом подключен к первому входу БФКЗ АБ, а ко второму входу указанного блока подключен первый выход БУСЭС. Выход БФКЗ АБ подключен к третьему входу ЗРУ АБ. Второй и третий выходы БУСЭС подключены, соответственно, к первым входам БУОСБС и БРСБЗП. Выход УПСБ соединен со вторыми входами БУОСБС и БРСБЗП. Выходы БУОСБС и БРСБЗП соединены, соответственно, с первым и вторым входами УПУ, выход которого, в свою очередь, соединен с входом УПСБ. Причем УПСБ механически соединено с СБ.
Суть действий, реализуемых данной системой, заключается в следующем. Для максимизации прихода электроэнергии от СБ осуществляют разворот панелей СБ в рабочее положение, соответствующее совмещению нормали к их освещенной рабочей поверхности с плоскостью, образуемой осью вращения панелей СБ и направлением на Солнце. Далее определяют момент времени начала негативного воздействия ФВС на рабочую поверхность СБ и осуществляют разворот панелей СБ на задаваемый угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце до момента времени начала воздействия указанных факторов и возвращение панелей СБ в рабочее положение после окончания указанного воздействия.
Электроэнергия, вырабатываемая БФБ, передается от СБ на БРТ. Далее электроэнергия от БРТ поступает на ШЭ СЭС. На теневой части орбиты (при отсутствии тока от СБ) ЗРУ АБ, за счет разряда блока АБ, компенсирует дефицит электроэнергии на борту КА. Наряду с этим, ЗРУ АБ осуществляет заряд БАБ через БФКЗ АБ. При этом для проведения зарядно-разрядных циклов в ЗРУ АБ используется информация от ДТН.
Одновременно с работой в режиме электроснабжения КА система решает задачи управления положением плоскостей панелей СБ. В зависимости от выполняемой программы полета КА приоритет на управление СБ отдается одному из блоков БУОСБС или БРСБЗП.
По команде с БУСЭС блок БУОСБС осуществляет управление ориентацией СБ на Солнце. Входной информацией для алгоритма управления СБ являются: положение единичного вектора направления на Солнце относительно связанных с КА осей координат; положение СБ относительно корпуса КА, получаемое в виде текущих измеренных значений угла между текущим положением нормали к рабочей поверхности СБ и направлением на Солнце с датчиков угла (ДУ), установленных на УПСБ. При ориентации СБ на Солнце 0. Выходной информацией алгоритма управления являются команды на вращение СБ относительно оси выходного вала УПСБ и команды на прекращение вращения. ДУ УПСБ выдают дискретные сигналы о положении СБ. Величина дискреты определяет точность ориентации СБ.
БРСБЗП управляет СБ при помощи БУСЭС по программным уставкам. Алгоритм управления СБ по программным уставкам позволяет устанавливать батарею в любое требуемое положение, задаваемое требуемым значением угла = 2 . При этом для контроля угла разворота в БРСБЗП используется также информация с ДУ УПСБ.
УПУ играет роль интерфейса между БУОСБС, БРСБЗП и УПСБ.
Известно (см. , стр.272), что солнечное излучение, поступающее к Земле, отражается от ее поверхности, от облаков, рассеивается атмосферой. Энергия отраженного излучения, сосредоточенная в спектральном диапазоне области чувствительности солнечных элементов СБ, воспринимается СБ и увеличивает их выходную мощность.
Таким образом, на освещенной части орбиты КА на СБ кроме прямого солнечного излучения попадает отраженное от Земли излучение. Способ и система, принятые за прототип, имеют существенный недостаток - они не позволяют увеличивать приход электроэнергии за счет дополнительного использования отраженного от Земли солнечного излучения.
Задачей, стоящей перед предлагаемой системой, является увеличение прихода электроэнергии от СБ за счет дополнительного использования отраженного от Земли солнечного излучения, поступающего на рабочую и тыльную поверхности панелей СБ, с учетом возможного затенения поверхности СБ элементами конструкции КА.
Технический результат достигается тем, что в систему управления положением солнечных батарей космического аппарата, включающую солнечную батарею, имеющую положительную выходную мощность тыльной поверхности, с блоком установленных на ней фотоэлектрических батарей, устройство поворота солнечных батарей, усилительно-преобразующее устройство, блок управления ориентацией солнечных батарей по направлению на Солнце, блок разворота солнечных батарей в заданное положение, блок регуляторов тока, датчик тока, блок управления системой электроснабжения, при этом выход блока фотоэлектрических батарей соединен с входом блока регуляторов тока, выход которого соединен с входом датчика тока, а выходы блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение соединены, соответственно, с первым и вторым входами усилительно-преобразующего устройства, выход которого соединен с входом устройства поворота солнечных батарей, выход которого соединен с входами блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение, причем устройство поворота солнечных батарей механически соединено с солнечной батареей, дополнительно введены блок измерения высоты орбиты космического аппарата, блок измерения ориентации космического аппарата, блок измерения угла возвышения Солнца над видимым с космического аппарата горизонтом Земли, блок задания максимального значения тока, вырабатываемого солнечными батареями под воздействием прямого солнечного излучения, блок определения моментов попадания отраженного от Земли излучения на рабочую поверхность солнечных батарей, блок определения моментов попадания отраженного от Земли излучения на тыльную поверхность солнечных батарей, блок определения моментов генерации солнечными батареями дополнительной электроэнергии под воздействием отраженного от Земли излучения, блок определения угла поворота солнечных батарей, блок определения площади освещенной солнечным излучением части рабочей поверхности солнечных батарей, два ключа и элементы НЕ и ИЛИ, при этом выход датчика тока соединен с первыми входами блока определения угла поворота солнечных батарей и блока определения моментов генерации солнечными батареями дополнительной электроэнергии под воздействием отраженного от Земли излучения, выход и со второго по четвертый входы которого соединены соответственно с входом элемента НЕ и выходами блока задания максимального значения тока, вырабатываемого солнечными батареями под воздействием прямого солнечного излучения, элемента ИЛИ и блока определения площади освещенной солнечным излучением части рабочей поверхности солнечных батарей, первый и второй входы и выход которого также соединены соответственно с выходами блока измерения ориентации космического аппарата, устройства поворота солнечных батарей и вторым входом блока определения угла поворота солнечных батарей, выход и с третьего по восьмой входы которого соединены соответственно с вторым входом блока разворота солнечных батарей в заданное положение и выходами устройства поворота солнечных батарей, блока задания максимального значения тока, вырабатываемого солнечными батареями под воздействием прямого солнечного излучения, блока измерения высоты орбиты космического аппарата, блоков определения моментов попадания отраженного от Земли излучения на рабочую и на тыльную поверхности солнечных батарей и блока измерения угла возвышения Солнца над видимым с космического аппарата горизонтом Земли, выход которого также соединен с первыми входами блоков определения моментов попадания отраженного от Земли излучения на рабочую и на тыльную поверхности солнечных батарей, вторые входы которых соединены с выходом блока измерения высоты орбиты космического аппарата, при этом выходы блоков определения моментов попадания отраженного от Земли излучения на рабочую и на тыльную поверхности солнечных батарей также соединены соответственно с разными входами элемента ИЛИ, а выход блока управления системой электроснабжения соединен с информационными входами первого и второго ключей, управляющие входы которых соединены с выходами соответственно элемента НЕ и блока определения моментов генерации солнечными батареями дополнительной электроэнергии под воздействием отраженного от Земли излучения, причем выходы первого и второго ключей соединены соответственно с вторым входом блока управления ориентацией солнечных батарей по направлению на Солнце и девятым входом блока определения угла поворота солнечных батарей.
Предлагаемое изобретение применяется к классу КА, СБ которых могут затеняться элементами конструкции КА, а также СБ которых имеют положительную выходную мощность при освещении со стороны тыльной поверхности панелей СБ.
В предлагаемом техническом решении достигается увеличение тока, вырабатываемого СБ, имеющими положительную выходную мощность тыльной поверхности панелей СБ, за счет дополнительного использования отраженного от Земли солнечного излучения, попадающего на рабочую и тыльную поверхности панелей СБ. Для этого при нахождении КА на освещенной части витка орбиты ориентируют нормаль к рабочей поверхности на СБ на Солнце и определяют интервалы времени, когда солнечное излучение, отраженное от Земли, поступает или на рабочую, или на тыльную поверхности панелей СБ. После чего поворачивают СБ таким образом, чтобы обеспечить максимальную выработку электроэнергии от суммарного освещения СБ прямым солнечным излучением, поступающим на рабочую поверхность панелей СБ, и отраженным от Земли излучением, поступающим на рабочую или на тыльную поверхности панелей СБ.
Суть предлагаемого изобретения поясняется на фиг.1-8, на которых представлено: на фиг.1 и 2 - схемы освещения СБ прямым и отраженным от Земли солнечным излучением для случаев, когда отраженное от Земли излучение поступает соответственно на рабочую и на тыльную поверхности панелей СБ; на фиг.3 и 4 - схемы освещения СБ в предлагаемой системе; на фиг.5 - схема геометрического построения, поясняющая определение вводимого далее угла ; на фиг.6 - схема геометрического построения, поясняющая определение освещенной площади рабочей поверхности СБ с учетом затенения СБ; на фиг.7 - блок-схема предложенной системы; на фиг.8 - график прихода электроэнергии от СБ российского сегмента (PC) международной космической станции (МКС).
Поясним действия, реализуемые предлагаемой системой.
На фиг.1-4, поясняющих описываемые схемы освещения СБ, все построения выполнены в плоскости, образованной радиус-вектором КА и направлением на Солнце, и введены обозначения:
N - нормаль к рабочей поверхности панелей СБ;
S, PC, ВС * - вектора направления на Солнце;
О - центр Земли;
ОР - радиус-вектор КА;
OB - радиус Земли;
В - точка, от которой поток отраженного излучения поступает на КА;
Угол между направлениями от КА на Солнце и на точку В;
MM * - линия горизонта в точке В;
S и - угол падения и угол отражения от Земли солнечного излучения, поступающего на КА;
PD - направление от КА на горизонт Земли;
В * - точка касания Земли линией PD;
g - угол возвышения Солнца над видимым с КА горизонтом Земли;
Q z - угол полураствора видимого с КА диска Земли;
Угол между направлениями РО и РВ;
Q sb - угол полураствора зоны чувствительности рабочей поверхности панелей СБ, измеряемый от нормали N (обозначен только на фиг.1 и 3);
Угол между N и S (обозначен только на фиг.3 и 4);
На фиг.2 и 4 дополнительно обозначено:
N O - нормаль к тыльной поверхности панелей СБ;
S O - противосолнечное направление;
Угол между направлением N o и направлением от КА на точку В;
Q O - угол полураствора зоны чувствительности тыльной поверхности панелей СБ, измеряемый от нормали N o .
Рассматриваем текущую ориентацию СБ, при которой нормаль к рабочей поверхности СБ N совмещается с направлением на Солнце S (при этом N o совмещена с S o).
Используем понятие зон чувствительности каждой из рассматриваемых поверхностей панелей СБ - областей, определяемых конструктивными особенностями элементов СБ, при освещении со стороны которых СБ способна вырабатывать электрический ток. Задаем зону чувствительности каждой поверхности панелей СБ значением угла полураствора зоны, отсчитываемым от нормали к рассматриваемой поверхности СБ:
Q sb - угол полураствора зоны чувствительности рабочей поверхности панелей СБ, Q sb <90°,
Q o - угол полураствора зоны чувствительности тыльной поверхности панелей СБ, Q o <90°.
При освещении СБ извне данных областей генерируемый ток отсутствует или пренебрежительно мал.
Поступление отраженного от Земли излучения на КА возможно только на освещенной части орбиты, при этом расположение точки отражения (точка В) определяется соотношением углов падения s и отражения солнечного излучения от Земли (см. , стр.39-52; ).
После выхода КА из тени Земли на освещенную часть орбиты и перед входом КА в тень Земли отраженное от Земли излучение попадает на рабочую поверхность панелей СБ (случай А, представленный на фиг.1).
Данный участок орбиты определяется условиями:
С учетом понятия зоны чувствительности СБ, отраженное от Земли излучение используется рабочей поверхностью панелей СБ для выработки электроэнергии при выполнении условия:
то попадание отраженного от Земли излучения на рабочую поверхность СБ и его использование для выработки электроэнергии осуществляется также при условии
При нахождении КА на средней части освещенного участка орбиты отраженное от Земли излучение воздействует на тыльную поверхность панелей СБ (случай В, представленный на фиг.2). Данный участок орбиты определяется условиями:
С учетом понятия зоны чувствительности СБ, отраженное от Земли излучение используется тыльной поверхностью панелей СБ для выработки электроэнергии при выполнении условия:
Для определения угла можно использовать разные методики.
Из равенства сумм углов, составляющих угол ОРС, следует:
В случае А значения углов g и близки и можно использовать формулу:
В случае В угол мал и значения углов и (Q z +g) близки, поэтому можно использовать формулу:
Угол полураствора видимого с КА диска Земли Q z определяется из треугольника ОРВ * :
где обозначено: R e - радиус Земли, Н о - высота орбиты КА.
Можно использовать и более сложную методику определения угла , одним из возможных вариантов которой является следующая вычислительная процедура.
На фиг.5, поясняющей определение угла , дополнительно обозначено:
К - вершина прямого угла прямоугольного треугольника ОРК.
Угол определяется из прямоугольных треугольников ОРК и ОВК:
Подставляя в (11) выражения (14), (18) и выразив , получаем соотношение для точного определения угла :
Угол связан с углами , s соотношением, получаемым из равенства углов при секущей РВ параллельных прямых PC и ВС * :
В случае, когда характер поверхности отражения позволяет предположить равенство углов падении и отражения:
Значение , удовлетворяющее уравнению (23), находится методом итераций по следующей процедуре.
Обозначим решение данного уравнения относительно как о и обозначим функцию, стоящую в правой части (23), как:
На первой итерации в функцию (24) подставляем значение , равное 1 - некоторому начальному приближению искомого значения о. В случае А в качестве начального приближения удобно взять значение угла g, в случае В - значение суммы (Q z +g).
Выполняем последовательно для шагов i=1, 2, 3,... итерационный процесс, на каждом i-м шаге которого находим i+1 - новое приближение к искомому значению о - по формуле
с учетом областей определения угла : (2) - в случае А и (7) - в случае В. При этом каждое новое приближение будет ближе к искомому значению о, чем предыдущее.
Итерационный процесс останавливаем, когда разность между полученным новым приближением i+1 и предыдущим приближением i будет меньше требуемой точности вычислений (требуемой точности вычисления значения о):
т.к. в дальнейшем каждое новое приближение будет отличаться от предыдущего приближения на величину, меньшую . При этом искомое значение о, к которому сходится последовательность последовательных приближений i+1 , i=1, 2, 3,..., также отличается от последнего полученного приближения на величину не более . Таким образом, искомое значение о с учетом требуемой точности вычислений получено:
Данный итерационный процесс достаточно быстро сходится к искомому решению - например, для случая управления ориентацией СБ PC МКС, описанного далее в качестве иллюстрации применения данного технического предложения, искомое значение с точностью 1° достигается уже на 4 шаге итерационного процесса.
При отсутствии попадания на СБ отраженного от Земли солнечного излучения, ток I, вырабатываемый СБ, определятся выражением (см. , стр.109):
где I - текущий ток, вырабатываемый СБ;
I s_max - ток, вырабатываемый СБ при ориентации освещенной рабочей поверхности панелей СБ перпендикулярно солнечным лучам при отсутствии попадания отраженного от Земли излучения на поверхность панелей СБ и при отсутствии затенения рабочей поверхности СБ элементами конструкции КА.
Принимаем, что вырабатываемый СБ ток пропорционален площади поверхности панелей СБ, на которую падает излучение, воздействующее на солнечные элементы СБ. Обозначим:
p s - плотность потока солнечного излучения;
S s - площадь части рабочей поверхности панелей СБ, на которую поступает солнечное излучение;
р о - плотность потока отраженного от Земли излучения;
S o - площадь части поверхности панелей СБ, на которую поступает отраженное от Земли излучение.
Рассмотрим сначала случай А, когда отраженное от Земли излучение поступает на рабочую поверхность СБ (фиг.1 и 3).
В предлагаемой системе на этом участке орбиты отклоняем нормаль к рабочей поверхности СБ N от направления S в сторону, с которой на СБ поступает отраженное от Земли излучение, на расчетное значение угла между N и S (фиг.3), обеспечивающее максимальную генерацию СБ электроэнергии от суммарного воздействия на рабочую поверхность СБ прямого солнечного излучения и отраженного от Земли излучения. Данная ориентация СБ осуществляется поворотом N от S в сторону центра Земли (в сторону, с которой на СБ поступает отраженное от Земли излучение) на расчетное значение угла , определяемое следующим образом.
При отклонении N от S в сторону, с которой на СБ поступает отраженное от Земли излучение, на угол , сумма Р эффективных значений потоков прямого солнечного излучения и отраженного от Земли излучения, поступающих на рабочую поверхность панелей СБ, рассчитывается по формуле (см. , стр.57):
Формулу для расчета значения угла , доставляющего максимум (29), получаем приравнивая нулю производную данного выражения по :
Выразим р о S о из соотношения (29):
Подставив (33) в (32) получаем:
Обозначим:
S s_max - максимальная площадь рабочей поверхности панелей СБ.
Под воздействием суммарного излучения Р СБ генерируют текущий ток I, под воздействием потока излучения (p s S s_max) СБ генерируют ток, равный I s_max . При этом
Соотношение (34) с учетом (36) принимает вид:
Теперь рассмотрим случай В, когда отраженное от Земли излучение поступает на тыльную поверхность СБ (фиг.2 и 4).
В предлагаемой системе на этом участке орбиты отклоняем нормаль к тыльной поверхности СБ N o от направления S o в сторону, с которой на СБ поступает отраженное от Земли излучение, на расчетное значение угла между N o и S o (фиг.4), обеспечивающее максимальную генерацию СБ электроэнергии от суммарного воздействия на рабочую поверхность СБ прямого солнечного излучения и на тыльную поверхность СБ - отраженного от Земли излучения. Данная ориентация СБ осуществляется поворотом N o от S o в строну центра Земли (в сторону, с которой на СБ поступает отраженное от Земли излучение), что эквивалентно повороту N от S в сторону от центра Земли (или в сторону направления радиус-вектора КА), на расчетное значение угла , определяемое следующим образом.
При отклонении N o от S o в сторону, с которой на СБ поступает отраженное от Земли излучение, на угол , угол между направлением N o и направлением на источник поступающего на СБ отраженного от Земли излучения (точка В), определяется соотношением:
В этом случае сумма Р эффективных значений потоков излучения, поступающих на рабочую поверхность панелей СБ (прямое солнечное излучение) и тыльную поверхность панелей СБ (отраженное от Земли излучение), рассчитывается по формуле:
Формулу для расчета значения угла , доставляющего максимум (40), получаем приравнивая нулю производную данного выражения по :
Выразим p o S o из соотношения (40):
Таким образом, получены уравнения (37) и (46) для нахождения оптимальных углов поворота СБ для случаев А и В. Решение данных уравнений относительно осуществляем методом итераций по следующей процедуре.
Представим уравнения (37) и (46) в виде, соответственно:
Обозначим функции, стоящие в правой части (47) и (48), как:
Обозначим решение рассматриваемого уравнения как о.
На первой итерации в функцию (49) подставляем значение , равное 1 - начальному приближению искомого значения o , в качестве которого берем 0° (можно взять, также, текущее значение угла между N и S):
Выполняем для шагов i=1, 2, 3,... итерационный процесс, на каждом i-м шаге которого находим i+1 - новое приближение к искомому значению o - по формуле:
При этом каждое новое приближение будет ближе к искомому значению о, чем предыдущее. Итерационный процесс останавливаем, когда разность между полученным новым приближением i+1 и предыдущим приближением i будет меньше требуемой точности вычислений :
т.к. в дальнейшем каждое новое приближение будет отличаться от предыдущего приближения на величину, меньшую . При этом искомое значение o , к которому сходится последовательность последовательных приближений i+1 , i=1, 2, 3,..., также отличается от последнего полученного приближения на величину не более .
Таким образом, искомое значение о с учетом требуемой точности вычислений получено:
Учет отраженного от Земли излучения необходимо производить при выполнения условия
когда за счет попадания отраженного от Земли излучения на рабочую или тыльную поверхности панелей СБ, текущее значение тока от СБ превосходит максимально возможное значение тока, полученное при условии отсутствия попадания отраженного от Земли излучения на СБ, умноженное на коэффициент, учитывающий текущее возможное затенение рабочей поверхности СБ элементами конструкции КА.
Текущее значение площади S s рассчитывается следующим образом. На фиг.6, поясняющей необходимые геометрические построения, обозначено:
X sb , Y sb - оси координат связанной с СБ декартовой системы координат, ось X sb направлена по нормали к рабочей поверхности СБ.
P 1 P 2 - рабочая поверхность СБ;
K 1 K 2 - элемент конструкции КА, затеняющий рабочую поверхность СБ;
P 1 P p - часть рабочей поверхности СБ, затененная элементом K 1 K 2 ;
Р р Р 2 - освещенная часть рабочей поверхности СБ;
P k - крайняя точка проекции элемента K 1 K 2 на рабочую поверхность СБ.
Рассмотрим рабочую поверхность СБ прямоугольной формы. Координаты точек P 1 (0; у 1) и Р 2 (0; у 2) в связанной с СБ системе координат постоянны, а значение всей площади рабочей поверхности СБ S s_max задается формулой:
где L - линейный размер СБ вдоль оси Z sb связанной с СБ декартовой системы координат.
По измерениям параметров ориентации КА и положению СБ относительно КА определяем координаты элементов конструкции КА, затеняющих рабочую поверхность СБ, в связанной с СБ системе координат. Обозначим полученные координаты крайней точки затеняющего элемента K 1 K 2 в связанной с СБ системе координат как К 2 (х k ; у k).
Тогда координаты точки Р k равны (0; у k), а координата у р точки Р р (0; у р) - точки, разделяющей освещенную и затененную части рабочей поверхности СБ, - определяется по формуле
Текущее значение площади S s рассчитывается по формуле:
Блок-схема предложенной системы, представленная на фиг.7, содержит следующие блоки:
1 - СБ; 2 - БФБ; 3 - УПСБ; 4 - УПУ; 5 - БУОСБС; 6 - БРСБЗП; 7 - БРТ;
8 - ДТ; 9 - БУСЭС;
10 - блок измерения высоты орбиты космического аппарата (БИВОКА);
11 - блок измерения ориентации космического аппарата (БИОКА);
12 - блок измерения угла возвышения Солнца над видимым с космического аппарата горизонтом Земли (БИУВСВГЗ);
13 - блок задания максимального значения тока, вырабатываемого солнечными батареями под воздействием прямого солнечного излучения (БЗМТВСБВПСИ);
14 - блок определения моментов попадания отраженного от Земли излучения на рабочую поверхность солнечных батарей (БОМПОЗИРПСБ);
15 - блок определения моментов попадания отраженного от Земли излучения на тыльную поверхность солнечных батарей (БОМПОЗИТПСБ);
16 - блок определения моментов генерации солнечными батареями дополнительной электроэнергии под воздействием отраженного от Земли излучения (БОМГСБДЭВОЗИ);
17 - блок определения угла поворота солнечных батарей (БОУПСБ);
18 - блок определения площади освещенной солнечным излучением части рабочей поверхности солнечных батарей (БОПОСИРПСБ);
19, 20 - первый и второй ключи;
21 - элемент НЕ;
22 - элемент ИЛИ,
при этом выход БФБ (2) соединен с входом БРТ (7). Выход БРТ (7) соединен с входом ДТ (8). Выходы БУОСБС (5) и БРСБЗП (6) соединены соответственно с первым и вторым входами УПУ (4). Выход УПУ (4) соединен с входом УПСБ (3). Выход УПСБ (3) соединен с первыми входами БУОСБС (5) и БРСБЗП (6). Выход ДТ (8) соединен с первыми входами БОУПСБ (17) и БОМГСБДЭВОЗИ (16). Выход и со второго по четвертый входы БОМГСБДЭВОЗИ (16) соединены соответственно с входом элемента НЕ (21) и с выходами БЗМТВСБВПСИ (13), элемента ИЛИ (22) и БОПОСИРПСБ (18). Первый и второй входы и выход БОПОСИРПСБ (18) также соединены соответственно с выходами БИОКА (11), УПСБ (3) и вторым входом БОУПСБ (17). Выход и с третьего по восьмой входы БОУПСБ (17) соединены соответственно с вторым входом БРСБЗП (6) и выходами УПСБ (3), БЗМТВСБВПСИ (13), БИВОКА (10), БОМПОЗИРПСБ (14), БОМПОЗИТПСБ (15), БИУВСВГЗ (12). Выход БИУВСВГЗ (12) также соединен с первыми входами БОМПОЗИРПСБ (14) и БОМПОЗИТПСБ (15). Вторые входы БОМПОЗИРПСБ (14) и БОМПОЗИТПСБ (15) соединены с выходом БИВОКА (10). Выходы БОМПОЗИРПСБ (14) и БОМПОЗИТПСБ (15) также соединены соответственно с разными входами элемента ИЛИ (22). Выход БУСЭС (9) соединен с информационными входами первого и второго ключей (19) и (20). Управляющие входы первого и второго ключей (19) и (20) соединены с выходами соответственно элемента НЕ (21) и БОМГСБДЭВОЗИ (16). Выходы первого и второго ключей (19) и (20) соединены соответственно с вторым входом БУОСБС (5) и девятым входом БОУПСБ (17).
На фиг.7 также пунктиром показана механическая связь УПСБ (3) с корпусом СБ (1) через выходной вал привода СБ.
Система работает следующим образом.
Электроэнергия от БФБ (2) поступает на БРТ (7), далее от которого она поступает на ШЭ СЭС КА. При этом БРТ (7) соединен с ДТ (8), который измеряет текущее значение тока, вырабатываемого СБ.
В БИВОКА (10) измеряется значение высоты орбиты КА.
В БИОКА (11) измеряются параметры ориентации КА.
В БИУВСВГЗ (12) определяется значение угла возвышения Солнца над видимым с КА горизонтом Земли.
В БОМПОЗИРПСБ (14) определяются моменты времени, в которые возможно попадание отраженного от Земли излучения на рабочую поверхность панелей СБ. Для этого осуществляется проверка выполнения условия (5). В данном блоке может быть реализована также более сложная вычислительная схема, включающая вычисление угла по формуле (12) или по вычислительной процедуре (23)-(27) и проверку условия (3). При выполнении условий (5), (3) блок БОМПОЗИРПСБ (14) генерирует команду, поступающую на первый вход элемента ИЛИ (22).
В БОМПОЗИТПСБ (15) определяются моменты времени, в которые возможно попадание отраженного от Земли излучения на тыльную поверхность панелей СБ. Для этого осуществляется проверка выполнения условия (6). В данном блоке также может быть реализована более сложная вычислительная схема, включающая вычисление угла по формуле (13) или по вычислительной процедуре (23)-(27) и проверку условия (10). При выполнении условий (6), (10) блок БОМПОЗИТПСБ (15) генерирует команду, поступающую на второй вход элемента ИЛИ (22).
При поступлении команды на любой из двух входов элемента ИЛИ (22) на выходе элемента ИЛИ (22) генерируется команда, поступающая на соответствующий вход БОМГСБДЭВОЗИ (16). Отметим, что блоки БОМПОЗИРПСБ (14) и БОМПОЗИТПСБ (15) не могут одновременно генерировать команды, т.к. в них проверяется выполнение взаимоисключающих геометрических условий.
В БОПОСИРПСБ (18) определяется площадь той части рабочей поверхности СБ, которая в текущий момент времени освещена прямым солнечным излучением. По входной информации о параметрах ориентации КА, поступающей от БИОКА (11), и угле положения СБ относительно КА, поступающей с УПСБ (3), блок БОПОСИРПСБ (18) реализует вычислительную процедуру (56)-(57).
В БОМГСБДЭВОЗИ (16) определяются моменты использования СБ отраженного от Земли излучения - моменты генерации СБ дополнительной электроэнергии под воздействием отраженного от Земли излучения. Данные моменты соответствуют одновременному выполнению условия (54) и условий попадания отраженного от Земли излучения на рабочую или тыльную поверхности панелей СБ (выполнение последних условий осуществляется в блоках БОМПОЗИРПСБ (14) и БОМПОЗИТПСБ (15)). При одновременном выполнении условия (54) и поступлении сигнала от элемента ИЛИ (22) блок БОМГСБДЭВОЗИ (16) генерирует команду, поступающую на вход элемента НЕ (21) и управляющий вход ключа (20).
При невыполнении условия (54) или непоступлении сигнала от элемента ИЛИ (22) на выходе БОМГСБДЭВОЗИ (16) команда не генерируется. Тогда элемент НЕ (21) генерирует команду, поступающую на управляющий вход ключа (19). При этом ключ (20) закрыт, а ключ (19) открыт.
При таком состоянии ключей (19) и (20) команда управления с БУСЭС (9) через открытый ключ (19) поступает в блок БУОСБС (5), который осуществляет управление ориентацией СБ (1) на Солнце. БУОСБС (5) может быть реализован на базе системы управления движением и навигацией (СУДН) КА (см. ). Входной информацией для алгоритма управления СБ являются: положение единичного вектора направления на Солнце относительно связанных с КА осей координат, определяемое алгоритмами кинематического контура СУДН; положение СБ относительно корпуса КА, получаемое в виде текущих измеренных значений угла с ДУ УПСБ (3). Выходной информацией алгоритма управления являются команды на вращение СБ относительно оси выходного вала УПСБ (3), команды на прекращение вращения. ДУ УПСБ (3) выдают сигналы о положении СБ (1).
Когда БОМГСБДЭВОЗИ (16) выдает команду, поступающую на управляющий вход ключа (20) и на элемент НЕ (21), то элемент НЕ (21) не генерирует команду на управляющем входе ключа (19). При этом ключ (20) открыт, а ключ (19) закрыт.
При таком состоянии ключей (19) и (20) команда управления с БУСЭС (9) через открытый ключ (20) поступает в БОУПСБ (17).
При поступлении команды с БУСЭС (9) на вход БОУПСБ (17) блок БОУПСБ (17) в зависимости от команд, поступивших от блоков БОМПОЗИРПСБ (14) и БОМПОЗИТПСБ (15), рассчитывает угол поворота СБ = о по вычислительным процедурам (47)-(53). При этом осуществляется также вычисление угла по формулам (12), (13) или (19), (23)-(27). Для вычислений используются значения , I, I s_max , S s , g, Н о, поступающие от УПСБ (3), ДТ (8), БЗМТВСБВПСИ (13), БОПОСИРПСБ (18), БИУВСВГЗ (12), БИВОКА(10). =
Реализация блоков БОМПОЗИРПСБ (14), БОМПОЗИТПСБ (15), БОМГСБДЭВОЗИ (16), БОУПСБ (17), БОПОСИРПСБ (18) возможна как на базе аппаратно-программных средств центра управления полетом (ЦУП) КА, так и на борту КА. Примером реализации БУСЭС (9) могут служить радиосредства служебного канала управления (СКУ) бортовыми системами КА «Ямал-100», состоящие из земной станции (ЗС) и бортовой аппаратуры (БА) (см. описание в ). В частности, БА СКУ совместно с ЗС СКУ, решает задачи выдачи в бортовую цифровую вычислительную систему (БЦВС) КА цифровой информации (ЦИ) и последующего ее квитирования. БЦВС, в свою очередь, осуществляет управление блоками БУОСБС (5), БОУПСБ (17), БРСБЗП (6).
УПУ (4) играет роль интерфейса между БУОСБС (5), БРСБЗП (6) и УПСБ (3) и служит для преобразования цифровых сигналов в аналоговые и усиление последних.
БИВОКА (10), БИОКА (11), БИУВСВГЗ (12) могут быть выполнены на базе датчиков и аппаратуры СУДН КА (см. , ). Реализация БЗМТВСБВПСИ (13), БОМПОЗИРПСБ (14), БОМПОЗИТПСБ (15), БОМГСБДЭВОЗИ (16), БОУПСБ (17), БОПОСИРПСБ (18) может быть произведена на базе БЦВС. Ключи (19), (20), элемент НЕ (21), элемент ИЛИ (22) могут быть выполнены в виде элементарных аналоговых схем. СБ (1), БФБ (2), УПСБ (3), УПУ (4), БУОСБС (5), БРСБЗП (6), БРТ (7), ДТ (8) могут быть выполнены на базе элементов СЭС (см. ).
Таким образом, рассмотрен пример реализации основополагающих блоков системы, по результатам которых принимается решение и реализуются предложенные операции.
Опишем технический эффект предлагаемых изобретений.
Предлагаемые технические решения обеспечивают максимальную генерацию электроэнергии от суммарного воздействия на СБ прямого солнечного излучения, поступающего на рабочую поверхность панелей СБ, и отраженного от Земли излучения, поступающего на рабочую или тыльную поверхности панелей СБ, с учетом возможных затенений рабочей поверхности СБ элементами конструкции КА. При этом увеличение прихода электроэнергии от СБ достигается за счет увеличения использования рабочей и тыльной сторонами поверхностей панелей СБ отраженного от Земли излучения путем выполнения в предложенные интервалы времени предложенных отворотов СБ от направления на Солнце в заданную сторону, определяемую направлением поступления на КА отраженного от Земли излучения, на расчетный угол, определяемый по предложенной методике.
Для иллюстрации на фиг.8 представлен график прихода электроэнергии от СБ PC MKC I(А) от времени t (с) в течение витка орбиты при поддержании ориентации СБ на Солнце: 02.02.2004 г., виток 1704, время 17.35-19.06 ДВМ, ориентация ИСК (см. ). На графике указан уровень тока I s_max и отмечены интервалы времени Т 1 , Т 2 , расположенные в начале и в конце освещенной части витка орбиты и соответствующие моментам выполнения условия (3), и интервал времени Т о, расположенный в средней части освещенного участка орбиты и соответствующий моментам выполнения условия (10). График иллюстрирует, что на данных интервалах выполняется условие (54), т.е. на поверхности панелей СБ дополнительно попадает отраженное от Земли излучение и выполнение поворота СБ на расчетный угол = о позволяет увеличить выработку СБ электроэнергии под воздействием суммарного излучения, поступающего на поверхности панелей СБ.
ЛИТЕРАТУРА
1. Елисеев А.С. Техника космических полетов. М.: Машиностроение, 1983.
2. Раушенбах Г. Справочник по проектированию солнечных батарей. М.: Энергоатомиздат, 1983.
3. Ковтун B.C., Соловьев С.В., Заикин С.В., Городецкий А.А. Способ управления положением солнечных батарей космического аппарата и система для его осуществления. Описание изобретения к патенту РФ №2242408 по заявке 2003108114/11 от 24.03.2003 г.
4. Крошкин М.Г. Физико-технические основы космических исследований. - М.: Машиностроение. 1969.
5. Кондратьев К.Я. Актинометрия. - М.: Гидрометеоиздат. 1965.
6. Грилихес В.А., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. М.: Наука, 1984.
7. Система управлением движением и навигации КА. Техническое описание. 300ГК.12Ю. 0000-АТО. РКК «Энергия», 1998.
8. Земная станция служебного канала управления КА «Ямал». Руководство по эксплуатации. ЗСКУГК.0000-0РЭ. РКК «Энергия», 2001.
9. Бортовая аппаратура служебного канала управления КА «Ямал». Техническое описание. 300ГК.15Ю. 0000А201-ОТО. РКК «Энергия», 2002.
10. Инженерный справочник по космической технике. Изд-во МО ССР, М., 1969.
11. Система электроснабжения КА. Техническое описание. 300ГК.20Ю. 0000-АТО. РКК «Энергия», 1998.
12. Рулев Д.Н., Стажков В.М., Корнеев А.П., Пантелеймонов В.Н., Мельник И.В. Оценка эффективности работы солнечных батарей российского сегмента международной космической станции по данным телеметрической информации// Труды XXXIX Чтений, посвященных разработке научного наследия и развитию идей К.Э.Циолковского (Калуга, 14-16 сентября 2004 г.). Секция «Проблемы ракетной и космической техники». - Казань: Казанский государственный университет им. В.И.Ульянова-Ленина. 2005.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Система управления положением солнечных батарей космического аппарата, имеющих блоки установленных на них фотоэлектрических батарей с положительной выходной мощностью тыльной поверхности, содержащая устройство поворота солнечных батарей, усилительно-преобразующее устройство, блок управления ориентацией солнечных батарей по направлению на Солнце, блок разворота солнечных батарей в заданное положение, блок регуляторов тока, датчик тока, блок управления системой электроснабжения, при этом выход блока фотоэлектрических батарей соединен с входом блока регуляторов тока, выход которого соединен с входом датчика тока, а выходы блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение соединены соответственно с первым и вторым входами усилительно-преобразующего устройства, выход которого соединен с входом устройства поворота солнечных батарей, выход которого соединен с входами блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение, причем устройство поворота солнечных батарей механически соединено с указанной солнечной батареей, отличающаяся тем, что в нее дополнительно введены блок измерения высоты орбиты космического аппарата, блок измерения ориентации космического аппарата, блок измерения угла возвышения Солнца над видимым с космического аппарата горизонтом Земли, блок задания максимального значения тока, вырабатываемого солнечными батареями под воздействием прямого солнечного излучения, блок определения моментов попадания отраженного от Земли излучения на рабочую поверхность солнечных батарей, блок определения моментов попадания отраженного от Земли излучения на тыльную поверхность солнечных батарей, блок определения моментов генерации солнечными батареями дополнительной электроэнергии под воздействием отраженного от Земли излучения, блок определения угла поворота солнечных батарей, блок определения площади освещенной солнечным излучением рабочей поверхности солнечных батарей, два ключа и элементы "НЕ" и "ИЛИ", при этом выход датчика тока соединен с первыми входами блока определения угла поворота солнечных батарей и блока определения моментов генерации солнечными батареями дополнительной электроэнергии под воздействием отраженного от Земли излучения, выход и входы - со второго по четвертый - которого соединены соответственно с входом элемента "НЕ" и выходами блока задания максимального значения тока, вырабатываемого солнечными батареями под воздействием прямого солнечного излучения, элемента "ИЛИ" и блока определения площади освещенной солнечным излучением части рабочей поверхности солнечных батарей, первый и второй входы и выход которого также соединены соответственно с выходами блока измерения ориентации космического аппарата, устройства поворота солнечных батарей и вторым входом блока определения угла поворота солнечных батарей, выход и входы - с третьего по восьмой - которого соединены соответственно со вторым входом блока разворота солнечных батарей в заданное положение и выходами устройства поворота солнечных батарей, блока задания максимального значения тока, вырабатываемого солнечными батареями под воздействием прямого солнечного излучения, блока измерения высоты орбиты космического аппарата, блоков определения моментов попадания отраженного от Земли излучения на рабочую и на тыльную поверхности солнечных батарей и блока измерения угла возвышения Солнца над видимым с космического аппарата горизонтом Земли, выход которого также соединен с первыми входами блоков определения моментов попадания отраженного от Земли излучения на рабочую и на тыльную поверхности солнечных батарей, вторые входы которых соединены с выходом блока измерения высоты орбиты космического аппарата, при этом выходы блоков определения моментов попадания отраженного от Земли излучения на рабочую и на тыльную поверхности солнечных батарей также соединены соответственно с разными входами элемента "ИЛИ ", а выход блока управления системой электроснабжения соединен с информационными входами первого и второго ключей, управляющие входы которых соединены с выходами соответственно элемента "НЕ" и блока определения моментов генерации солнечными батареями дополнительной электроэнергии под воздействием отраженного от Земли излучения, причем выходы первого и второго ключей соединены соответственно с вторым входом блока управления ориентацией солнечных батарей по направлению на Солнце и девятым входом блока определения угла поворота солнечных батарей.
Одним из очевидных способов повышения эффективности солнечных энергоустановок является использование в них систем слежения за солнцем. Разработка следящих систем с простым обслуживанием позволит в значительной степени повысить технико-экономические показатели сельскохозяйственных объектов и создать комфортные условия труда и быта человека при одновременном обеспечении экологической безопасности окружающей среды. Системы слежения могут быть с одной или двумя осями вращения солнечных панелей.
Солнечная энергоустановка с системой слежения, включающей компактный фотоэлектрический датчик положения солнца, состоящий из каркаса в форме прямой трёхгранной призмы, на двух боковых гранях которой размещены фотоэлементы слежения за солнцем, а на третьей грани установлен командный фотоэлемент разворота модулей с запада на восток. В течение светового дня фотоэлементы слежения на гранях датчика выдают командные сигналы для блока управления приводом азимутального поворота солнечного модуля, который при этом разворачивается в направлении солнца с помощью вала. Недостатком установки является недостаточная точность слежения за солнцем.
Солнечная энергетическая установка содержит солнечную батарею с системой двухосной ориентацией на солнце, на которой в качестве датчиков слежения за солнцем установлены фотоэлектрические модули, содержащие линейные фотоприёмники, находящиеся в фокусах цилиндрических линз Френеля. Сигналы от фотоприёмников с помощью микропроцессора осуществляют управление приводами системы азимутальной и зенитальной ориентации солнечной батареи.
Недостатком этой установки является недостаточная точность слежения за солнцем, а также то, что датчики слежения занимают часть активной площади солнечной батареи.
Основной задачей разработки является повышение точности работы датчика слежения за солнцем для двухосных систем ориентации солнечных батарей при любом положении солнца на небосводе в течение года.
Вышеуказанный технический результат достигается тем, что в предлагаемом датчике слежения за солнцем двухосной системы ориентации солнечной батареи, содержащем блок лучевоспринимающих ячеек, установленных на неподвижной площадке, которые выполнены в виде обратных конусов с непрозрачными стенками и укреплены на узких торцах конусов фотоэлектрических элементов. При этом лучевоспринимающие ячейки плотно установлены на площадке с образованием телесного угла в 160° и обрамлены прозрачной сферой, укреплённой на площадке, которая установлена с наклоном к горизонтали под углом, равным географической широте местоположения датчика.
Датчик слежения устанавливается на неподвижной площадке, нормаль 6 которой (рис. 1) направляется на юг. Угол наклона площадки к горизонтальному основанию соответствует географической широте местности рядом с солнечной батареей, размещённой на механической системе ориентации на солнце, содержащей приводы зенитального и азимутального вращения, использующие шаговые мотор-редукторы. Управление приводами солнечной батареи осуществляется микропроцессором, получающим электрические импульсы от фотоэлектрических элементов ячеек датчика. Микропроцессор содержит информацию о географической широте местонахождения солнечной батареи, электронные часы, снабжённые календарём, по сигналам которых включаются мотор-редукторы зенитального и азимутального вращения солнечной батареи в соответствии с уравнением движения солнца на небосводе. При этом величины достигнутых углов поворота солнечной батареи по сигналам фотоэлектрических элементов ячеек датчика сравниваются со значениями, полученными их уравнения движения солнца на текущий момент времени.
Сущность конструкции датчика поясняется рис. 1, 2, 3 и 4. На рис. 1 и 3 представлена общая схема датчика. На рис. 2 показан вид сверху прозрачной сферы и лучевоспринимающих ячеек. На рис. 4 показана схема такой ячейки.
Датчик слежения за солнцем для двухосной системы ориентации солнечных батарей содержит площадку 1, укреплённую к горизонтальному основанию 5 под углом а, равным географической широте местности. К площадке 1 прикреплена прозрачная полусфера 2 радиусом г. Во всём внутреннем пространстве сферы 2 вплотную укреплены лучевоспринимающие ячейки 3, имеющие форму обратного конуса с непрозрачными стенками 7, обращённого диаметром ф к внутренней стенке прозрачной сферы 2, а диаметром d 2 к площадке 1. Высота конуса 3 равна расстоянию h от внутренней стенки сферы 2 до поверхности площадки 1. В нижней части конуса 3 на расстоянии 5d 1 от верхней кромки конуса 3 расположен фотоэлектрический элемент 4, электрический сигнал от которого передаётся в микропроцессорную систему управления поворотами осей солнечной батареи (на рис. 1 не показана). Расстояние 5d 1 выбирается таким образом, чтобы солнечный луч 8 точно фиксировался на фотоэлектрическом элементе 4, ограниченного непрозрачными стенками 7 конуса 3.
Датчик слежения за солнцем работает следующим образом. Солнечные лучи 8 проникают через прозрачную сферу 2, внутреннее пространство конуса 3 и попадают на фотоэлектрический элемент 4, вызывая электрический ток, который анализируется микропроцессором и передаётся на шаговые мотор-редукторы приводов системы ориентации солнечной батареи (на рисунке не показана). При перемещении солнца по небосводу, его лучи 8 постепенно включают фотоэлектрические элементы 3 и способствуют точному и плавному регулированию поворотов солнечной батареи по азимутальной и зенитальной осям.
Лабораторные испытания макета ячейки датчика с использованием имитатора солнечного излучения показали приемлемые результаты отсекания светового потока для принятых значений d 1 , d 2 и 5d x .
Датчик слежения за солнцем двухосной системы ориентации солнечной батареи содержит лучевоспринимающие ячейки, выполненные в виде обратных конусов, плотно установленных на площадке с образованием телесного угла в 160° и обрамленных прозрачной сферой, позволяет более точно ориентировать солнечные батареи и тем самым получать наибольшее количество электроэнергии от них.